2024 우수잡지


-MPLAB Software Updates-KR 466x58H.jpg)

자율주행 차량의 사전 실리콘 검증 간극을 채워주는 에뮬레이션

글/Richard Pugh, MENTOR A SIEMENS BUSINESS
우리 할아버지 세대가 몰았던 차와 그 이전 시대부터, 자동차는 단순한 전자부품의 한정된 섬으로 구성된 극소수의 전자기술에 의존해왔다. 그 결과 실리콘 분야의 주의를 끌지 못했던 것이다. 하지만 최근 들어 이야기가 달라졌다. 미래형 차량에는 전자부품이 물밀듯 쏟아져 들어오고, 상황이 급변하면서 자동차 제조업이 갑자기 굉장히 매력적인 시장으로 떠올랐다. 이 추세를 가장 강하게 밀어붙이는 원동력은 사실 차량 자율주행이다.
자율주행 차량에는 복잡한 시스템온칩(SoC)이 꼭 필요하고, 각각의 SoC를 전체 차량을 염두에 두고 검증해야 한다. 검증 과정에서는 모든 것이 제대로 작동한다는 것뿐만 아니라 그 모든 것이 안전하고 안정적으로 작동한다는 것까지 입증해야 한다. 그러므로 기존 방식을 사용하는 것은 실리콘 설계와 검증 플로우에 역부족이다. 하지만 그렇다고 지금까지 쓰던 것을 모두 버리고 완전히 새로운 도구 세트를 개발할 수는 없다. 대신 기존의 플로우를 보강하여 자동차 요구사항에 맞게 변용해야 한다.
하나의 설계 전체에서 툴 플로우가 미묘하게 변하기도 하지만, 가장 극적인 변화는 차량 전략의 중심에 에뮬레이션이 자주 포함된다는 사실일 것이다. 에뮬레이션은 일종의 고성능 하드웨어 기반 검증 플랫폼이다. 자율주행 차량 칩 검증에는 안전하고 안정적이며 잘 작동하는 SoC를 보장하기 위해 에뮬레이션이 꼭 필요하다.
-1")
[그림 1] 자율주행 개발 통합: 칩의 디지털 트윈이 차량 AV 시스템의 디지털 트윈을 구동하여 주어진 도시의 디지털 트윈 버전 시내를 주행한다.
자동차 혁명: 세 가지 대세
자동차 시장이라는 기회는 크게 세 가지 추세로 요약할 수 있는 동인과 제약사항을 내포하고 있다.
• 포춘닷컴(Fortune.com)에 따르면 이 시장은 2050년까지 새로운 경제 활동을 통해 7조 달러를 창출할 것으로 전망된다.
• 이제까지 쓰이던, 다수의 ECU와 제한된 범위의 마이크로컨트롤러를 포함한 작은 섬 형태의 전자부품은 사라지고 그 자리를 높은 수준의 도메인 컨트롤러 몇 개가 대신 차지하게 된다.
• NCAP 안전성 등급과 같은 새로운 규정이 세계 각지에서 개발되어 이와 같은 신종 차량이 오늘날 우리가 운전하고 있는 기종만큼, 어쩌면 그보다 더 안전한 수준을 유지하도록 하고 있다.
새로운 전자부품 중 대부분은 자동차 OEM과 긴밀하게 협력하는 Tier-2 반도체 공급업체에서 제작하게 된다. 이 시장에서 성공을 거두려면 기존의 단일 구성요소 솔루션을 제공하는 데 그치는 것이 아니라, 고가치의 혁신적이고 안전하며 안정적인 멀티 ECU 서브시스템이 필요하다. 이러한 서브시스템의 연산 수준은 대폭 높아질 것이고, 복잡하고 정교한 소프트웨어 알고리즘 때문에 강력한 단일 코어 및 멀티코어 플랫폼에 큰 부담이 실리기 때문이다.
이처럼 복잡성이 강화된 데에 기능성, 안전성 및 보안에 대한 표준이 더욱 엄격해져 SoC 검증은 커다란 난관에 직면하게 되었다. 이러한 검증은 설계를 실리콘으로 실현하기 전에 완료해야 한다. 출시 시점에 맞춰 SoC가 제때 완성되고 경쟁업체 모두를 앞지르려면 최신 사전 실리콘(pre-silicon) 툴과 방법론을 확보하는 것이 매우 중요하다.
자율주행 차량으로 인해 생겨난 일련의 고유한 요구사항 때문에 새로운 검증 난제가 발생한다. 궁극적으로 각각의 서브시스템은 복잡한 하드웨어 조합의 일종으로, 여러 대의 CPU와 이미지 프로세서, 그리고 인공지능(AI) 엔진 등으로 구성된다. 이 하드웨어에서 복잡한 소프트웨어 애플리케이션이 실행된다. 그리고 그런 하드웨어와 소프트웨어는 따로 또 함께 반드시 검증해야 한다. 게다가 이들은 그저 올바로 작동하는 것만으로는 충분하지 않다. 이런 차량에 포함된 연결성이라는 특성을 감안할 때 보안을 확보해야 하며, ISO 26262에 명시된 안전성 표준에 반드시 부합해야 한다.
미래형 차량(자율주행 여부에 관계없이)은 기계 시스템을 전기 시스템이 대신하는 형태를 취할 것이다. 다시 말해 배터리로 지원해야 하는 시스템이 더 많아진다는 뜻이다. 그 결과, 이 모든 시스템과 서브시스템이 에너지 소비량을 최소한의 수준으로 줄여야 한다. 따라서 차량에서 사용되는 모든 SoC의 전력 검증에 중요한 의미가 있다.
그런가 하면, 그런 각 SoC마다 차량 내 다른 회로에서 액세스하기 위한 인터페이스가 포함될 것이다. 각 인터페이스를 검증하여 원래 의도한 액세스 권한을 제공하는지 확인해야 하고, 보안상의 이유로 원래 의도한 액세스 이상은 제공하지 않는다는 것도 확인해야 한다. 마찬가지로, 이러한 액세스는 차량 내 네트워크에서 실행되는 다양한 프로토콜을 통해야 하기도 한다. 그러므로 각 SoC는 그와 같은 프로토콜을 사용해 효율적인 통신이 가능하다는 점을 입증할 수 있어야 한다.
검증 커버리지는 항상 우려되는 점이지만, 일반적인 SoC의 일부분은 보통의 전자 시스템에서는 다루지 않고 간과되는 경향이 있다(경제적인 이유에서). 다만 차량의 안전성 기대치가 정해져 있기 때문에 자율주행에 대비해 더 높은 수준의 커버리지를 달성할 수 있어야 한다. 다시 말해 더 많은 수고를 들여야 한다는 것이다. 이때 이용할 수 있는 툴이 소프트웨어 시뮬레이터뿐이라면 실리콘 출시 시점이 늦어질 수 있다.
마지막으로, 하드웨어와 소프트웨어를 검증해야 한다는 사실은 알고 있지만, 그러다 문제가 발견되면 어떻게 해야 할까? 문제의 근본 원인은 어떻게 알 수 있을까? 이런 면에서 각종 문제점을 신속하게 시정하기 위해 디버깅 기능과 SoC의 내부 사정을 훤히 볼 수 있는 가시성이 중요한 것이다.
-2")
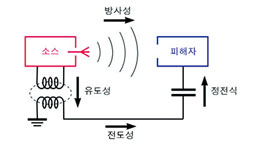
[그림 2] AV에서는 물리학, 구동, 센서, 임베디드 소프트웨어 및 SoC 등의 상호 의존성이 매우 높다.
사전 실리콘 검증 간극
복잡한 자동차용 SoC는 높은 수준의 추상으로 시작하여 설계되며 작동 설명부터 트랜지스터의 실물 배치까지 단계별로 나아가면서 설계를 조정한다. 검증도 이와 비슷한 방식으로 진행되어 점차 나아가면서 상세한 타이밍과 전력에까지 이르게 된다. 이는 즉 설계와 검증이 상위 수준 모델부터 시작한다는 뜻이다(Model-in-the-loop, MiL).
기본적인 작동이 올바르다는 것을 만족할 만한 수준으로 확인하고 나면, 설계 기능을 소프트웨어로 표현하는 단계로 넘어간다(Software-in-the-loop, SiL). SoC의 경우, 이는 소프트웨어에서 실행되는 표준 디지털 로직 시뮬레이션을 말한다. 좀 더 광범위하고 철저한 검증을 위해 성능과 정확도를 높여야 하는 경우, 하드웨어 플랫폼으로 넘어가야 한다(Hardware-in-the-loop, HiL). 이러한 여러 단계를 원활하게 오갈 수 있어야 하며, 이동하면서 설계를 재작업하느라 시간을 낭비하지 않아야 한다.
오늘날 쓰이는 주류 검증 플로우는 장래성이 괜찮아 보이는 요소를 제공하지만, 실제로는 미흡하다.
• 표준 로직 시뮬레이션(SiL)은 정확도가 우수하고 디버깅이 간편한 것이 장점이지만, 용량과 성능면에서 SoC 또는 상위 수준 시스템 복합 체계에 포함된 하드웨어와 소프트웨어의 전체 검증을 지원하기에는 역부족이다.
• 가상 프로토타이핑은 상위 수준 기능 모델에 도움이 되지만, 정확도 면에서 전체 사전 실리콘 검증에는 부족하다.
• 하드웨어 프로토타이핑은 성능 수준과 하드웨어 정확도가 높은 소프트웨어 알고리즘을 개발하는 데 도움이 되지만, 프로토타입은 용량에 한계가 있고 하드웨어 디버그 기능이 불량하며 컴파일 시간이 오래 걸린다. 따라서 이런 것은 자율주행 차량 서브시스템 규모에는 적합하지 않다.
• 기존 HiL에는 구현된 실리콘 칩을 사용한다. 여기에도 문제점은 있다. 예를 들어 작동이 덜 결정론적이고 디버그 성능이 불량하다는 것이 대표적이다. 하지만 목표가 사전 실리콘 검증이기 때문에 이런 문제점은 고려할 가치가 없게 된다. 이 접근 방식은 정의상 사전 실리콘 검증법이 아니다. 물론 완성된 칩이 예상한 대로 작동하는지는 확인해야 하지만, 그것은 별도의 프로세스이다.
전반적으로, 이러한 툴에는 대규모 자동차용 SoC에 필요한 용량, 여러 가지 검증 단계 사이를 원활하게 오가는 전환 방식, 고도의 디버그 가시성, 서로 다른 설계와 검증 툴 사이의 간편한 상호 연결 등을 비롯해 생산성을 개선하기 위해 자동차에 특화된 툴이 빠져 있다. 또한 세계 각지에 분산된 설계 팀에서 업무상 활용하거나 자동차 OEM과의 긴밀한 상의에 필요한 협업 기능도 일반적으로 제공하지 않는다.
마지막으로, 이러한 툴은 시장 위험 요소를 줄이고 비용이 많이 드는 차량 리콜을 방지할 수 있도록 전력, 안전성과 보안을 검증하는 데에는 적합하지 않다. 그러므로 이러한 툴에만 의존했다가는 검증 간극이 남게 된다.
검증 간극을 메워주는 VELOCE 에뮬레이터
Siemens에서는 일명 PAVE360이라는 차량 설계 및 검증 프로그램을 취합하여 선보였다. 이 플로우의 IC 설계 부분에는 그런 검증 간극을 메워줄 수 있을 만큼 강력하고 중요한 툴이 포함되어 있다. 그것이 바로 Mentor의 Veloce 에뮬레이터이다. 에뮬레이션이 새삼스러울 것은 없지만, 이제까지는 대량의 소프트웨어를 실행하는 고급 SoC(주로 네트워킹, 모바일 및 스토리지 시장)에 주로 사용되어 왔다.
하지만 이제 자율주행 차량 검증 분야에서 에뮬레이션은 더 이상 하나의 옵션이 아니다. Mentor의 자율주행 차량 플로우는 Veloce 에뮬레이션 플랫폼을 중심으로 구성되어 있다.
에뮬레이터란 하드웨어의 디지털 집적 회로를 모델링할 수 있는 특수 제작 슈퍼컴퓨터의 일종이다. 에뮬레이터는 대개 범용 컴퓨터에서 실행되는 일반적인 로직 시뮬레이터보다 1,000배에서 10,000배는 빨리 실행된다. 에뮬레이터에는 재구성 가능한 하드웨어 패브릭이 포함되어 있어 검증 대상인 SoC 설계를 구현할 수 있다. 운영 체제와 소프트웨어 애플리케이션으로 검증 프로세스를 진행하면서 광범위한 기능과 생산성을 제공하기도 한다. 에뮬레이터는 복잡한 로직, 그 로직에서 실행되는 소프트웨어와 시스템 복합 체계 전체를 철저히 검증하는 데 필요한 규모와 성능을 제공한다.
에뮬레이션은 오랫동안 옵션으로 존재해왔기 때문에 철저하게 검증되었다는 것도 장점이다. 에뮬레이션은 매우 높은 수준으로 발전하여 자율주행 차량 검증 플로우에 이를 포함시켜도 새로운 툴 위험 요소를 더하지 않는다. Veloce 에뮬레이터는 실리콘 설계 스위트 내 다른 모든 툴, 상위 수준 모델링 및 다중 물리학적 툴과 상호 운영할 수 있다. 예를 들어 Vista/SystemC, Amesim과 같은 전자기계 시뮬레이터도 기능 목업 인터페이스(Functional Mock-up Interface, FMI)를 통해 함께 사용할 수 있다.
또한 PAVE360에 포함된 수준 높은 자동차 전용 검증 기술과도 함께 사용할 수 있다. 이러한 기술은 자율주행의 중심적인 측면이 될 감지-결정-구동(sense-decide-actuate) 루프를 모델링하는 역할을 한다. 교통량, 스마트시티와 차량의 상호작용 등의 여러 가지 가상 시나리오를 테스트하여 차량이 각 상황에 적합한 방식으로 반응하는지 확인할 수도 있다.
Veloce 에뮬레이터가 제공하는 성능과 하드웨어 가시성에 OTT(Over The Top)로 실행되는 검증 애플리케이션이 함께 작용하여 소프트웨어, 전력 및 서브시스템 상호작용을 검사하고 디버깅할 수 있는 것이다.
광범위한 작업자 검증 IP(VIP) 라이브러리가 있어 기능 검증도 가능하며, 안전성 검증에 필요한 결함 주입과 분석용 애플리케이션도 제공된다. Veloce 에뮬레이터는 심지어 자동차의 디지털 트윈(digital twin) 역할도 할 수 있다.
Veloce 에뮬레이터가 자동차 SoC 및 서브시스템의 전체적인 종단간 검증을 지원하는 방식은 다음과 같다.
• 검증에 필요한 높은 수준의 로직 용량 제공(여러 개의 유닛을 함께 묶는 경우 로직 게이트 최대 150억 개)
• MiL, SiL 및 사전 실리콘 HiL 사이의 원활한 전환 허용
• 설계 세부 사항에 광범위한 가시성을 부여하여 하드웨어 및 소프트웨어의 효율적인 디버깅 가능
• 설계 및 검증 플로우의 다른 모든 툴과 직접 소통
• 자동차 분야에만 구체적으로 적용되는 검증 애플리케이션 및 리소스 제공
• 세계 각지에 분산된 팀원들 사이의 협업 허용
• 자동차 OEM과의 긴밀한 상의 허용
• 전력 및 기능 안전성 검증 수행
-3")
[그림 3] Siemens 툴은 시스템 수준 검증 환경의 기초 토대를 형성한다.
철저한 자동차 검증에는 에뮬레이션이 필수적
자동차 애플리케이션이 원활하고 안전하며 안정적으로 실행되도록 보장하는 데는 한 가지 방법밖에 없다. Veloce 에뮬레이터는 차량에 대한 높은 신뢰도를 부여하는 데 필요한 모든 테스트를 통해 모든 자동차 설계에 적용할 수 있는 규모와 성능을 제공한다. 에뮬레이터를 사용하면 실제에 가까운 운전자 가상 시나리오를 실행하고 차량 역학관계를 조사하며 전력 및 통신 메트릭을 분석해볼 수 있다.
이 모든 작업이 설계를 가상화하여 하드웨어와 소프트웨어를 한꺼번에, 또는 따로 테스트할 수 있는 플랫폼에서 실행된다. Veloce 에뮬레이터는 실리콘 설계와 검증 플로우에 자연스럽게 적용되면서 기존에는 옵션의 하나에 불과했지만 이제는 주역의 자리를 차지하게 되었다. 에뮬레이터는 다른 툴과 상호작용에 능하므로 검증 플로우가 원활하고 효율적인 상태로 유지된다. 에뮬레이터야말로 설계가 미래형 차량으로 나아가는 전자부품의 대열에 성공적으로 합류할 수 있도록 도와주는 유일한 방법이다.






 |





 |
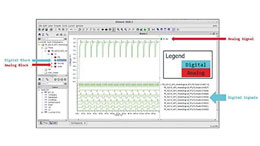
아날로그 설계를 위한 EDA 툴은 어떻게 진화하고 있는가?
조회수 815회 / Siemens EDA

전자제품 인터페이스의 설계 라이프사이클
조회수 598회 / David Wiens

전기 디자인 룰 체크(DRC)를 자동화하는 방법
조회수 1259회 /
 지멘스EDA 수석부사장.jpg)
2022년 시스템 및 설계 툴, 방법론의 시장 전망
조회수 1248회 / 지멘스
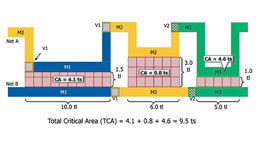
임계 영역을 이용한 자동차 IC의 테스트 품질 향상
조회수 1682회 / RON PRESS
SERDES 디자인을 위한 더 효율적인 솔루션이 있을까요?
조회수 1754회 / Neil Fernandes

지멘스 EDA 포럼 2021 열려, ‘Silicon to Systems’ 주제로 최신 설계 방...
조회수 1150회 / Joseph Sawicki
자동화된 EMC 분석을 PCB 레이아웃에 추가
조회수 1231회 / SIEMENS

DFT를 향한 성능 저하 없는 상향식 접근방식
조회수 2553회 / Geir Eide
PDF 다운로드
 |
회원 정보 수정
