2024 우수잡지


-SiC Renewables-KR 466x58H.JPG)

MCU 100% 활용하기

자료제공/텍사스 인스트루먼트
-0")
1. 로봇 모터 제어 설계에서 시스템 성능을 향상시키는 방법
로봇 시스템은 반복 작업을 자동화하고, 복잡하고 강력한 동작을 처리하며, 사람에게 위험하거나 유해한 환경에서 작업할 수 있다. 보다 통합된, 고성능 마이크로컨트롤러(MCU)를 통해 전력 효율을 높이고 훨씬 더 높은 정확도로 부드럽고 안전한 동작을 구현하여 생산성과 자동화를 향상시킨다. 예를 들어 레이저 용접, 정밀 코팅, 잉크젯 또는 3D 프린팅을 처리하는 애플리케이션의 경우 0.1mm 이내의 높은 정확도가 중요하다.
로봇 팔의 축 수와 필요한 제어 아키텍처 유형(중앙 집중식 또는 분산형)에 따라 궁극적으로 해당 시스템에 적합한 MCU 또는 모터 제어 집적 회로(IC)가 결정된다. 최신 공장에서는 다양한 제조 단계를 처리하기 위해 다양한 수의 축, x, y 또는 z 평면에서의 이동과 회전 정도를 가진 로봇을 혼합하여 사용하므로 공장 현장 전체에 다양한 제어 아키텍처가 혼재되어 있다.
향후 확장성을 제공하기 위해 추가 성능 헤드룸과 애드온 기능을 지원할 수 있는 용량을 갖춘 MCU를 선택하는 것이 중요하다. 확장성 및 추가 기능을 계획하면 설계 과정에서 비용, 시간, 복잡성을 줄일 수 있다.
이 기고문에서는 중앙 집중식 및 분산형(또는 탈중앙화)이라는 두 가지 유형의 모터 제어 아키텍처와 이를 지원하는 통합 실시간 MCU에 대한 설계 고려 사항을 살펴본다.
중앙 집중식 아키텍처
중앙 집중식 시스템에서는 여러 축을 제어하는 데 하나의 MCU가 사용된다. 이 접근 방식은 대형 방열판과 냉각 팬이 필요한 고출력 모터 드라이버(일반적으로 2~3kW 이상)의 방열을 처리하는 데 효과적이다. 이 아키텍처에서는 일반적으로 리졸버 보드 또는 인코더에 연결된 애그리게이터를 통해 외부에서 위치 데이터를 획득한다.
일반적으로 이 아키텍처에서는 여러 개의 전력계가 동일한 PCB에 있거나 근접해 있으므로 하나의 MCU로 여러 축을 제어할 수 있다. 이 접근 방식은 여러 모터 제어 MCU 간에 통신 회선을 길게 연결할 필요가 없으므로 여러 축 간의 실시간 제어 및 동기화가 간소화된다.
중앙 집중식 아키텍처의 모터 제어 MCU/MPU에는 주로 R5F 코어 또는 DSP와 같은 고성능 실시간 처리 코어, EtherCAT과 같은 실시간 통신 인터페이스, 전압 및 전류 감지를 위한 충분한 PMW 채널과 주변장치가 필요하다. Am243x와 같은 MCU는 확장 가능한 다중 축 시스템을 구현하고 단일 칩으로 최대 6개의 축에 대한 실시간 제어 주변 장치와 실시간 통신을 제공할 수 있다.
과거에는 자동화 시스템에서 중앙 집중식 모터 제어를 위해 주로 FPGA 또는 ASIC 장치가 사용되었다. 하지만 최근 AM243x와 같은 최신 ARM Cortex 기반 MCU의 인기가 높아지고 있습니다. 높은 수준의 통합과 비용 효율성으로 설계자는 시스템의 성능 요구 사항을 충족하는 동시에 설계 확장성과 유연성을 확보할 수 있다.
중앙 집중식 제어 아키텍처는 높은 페이로드의 산업용 로봇과 같은 고출력 자동화 시스템의 성능 및 효율성 설계 요구 사항을 충족할 수 있지만, 캐비닛에서 조인트의 기계식 모터까지, 위치 센서에서 애그리게이터까지 추가 케이블을 연결해야 한다는 단점이 있다. 이러한 와이어는 비용이 더 많이 들 뿐 아니라 마모되어 유지보수가 필요하다.
-1")
[그림 1] 다중 축 시스템을 위한 분산형 모터 제어 아키텍처의 블록 다이어그램
탈중앙화 또는 분산형 아키텍처
탈중앙화 또는 분산형 아키텍처(그림 2)는 최근 전력 요구 사항이 낮은 시스템에서 인기가 높아지면서 협동 로봇(코봇) 조작기의 표준 접근 방식이 되었다.
분산형 아키텍처는 여러 개의 단일 축 모터 드라이브를 로봇 내의 각 조인트에 통합하고 EtherCAT과 같은 실시간 통신 인터페이스를 통해 연결 및 동기화한다. 각 드라이브는 일반적으로 하나의 단일 축을 제어하고 특정 안전 기능을 로컬에서 처리한다. 따라서 각 MCU에는 실시간 제어 및 통신 기능, 단일 축을 위한 모터 제어 주변 장치, 3~6개의 PWM 채널, 온칩 연속 근사화 레지스터 아날로그-디지털 컨버터 또는 델타 시그마 변조기 입력이 필요하다.
이러한 애플리케이션에서 위치 센서는 일반적으로 MCU 옆에 위치하므로 위치 센서에서 데이터를 읽으려면 디지털 또는 아날로그 인터페이스가 필요하다. 이 아키텍처는 더 많은 MCU를 필요로 하지만, 전원 버스와 통신 인터페이스 사이에 케이블이 덜 필요하기 때문에 시스템 수준에서 비용을 크게 절감할 수 있다. F28P65x와 같은 최신 실시간 MCU는 필요한 모든 주변 장치뿐 아니라 안전 주변 장치를 통합하여 작은 크기에 고성능을 갖춘 분산형 아키텍처에서 통합 축을 위한 단일 또는 두 칩 솔루션을 구현할 수 있다.
-2")
[그림 2] 단일 축 시스템을 위한 분산형 모터 제어 아키텍처의 블록 다이어그램
마무리
모터는 로봇에서 가장 최신 유행하는 시스템은 아닐 수 있지만(특히 인공지능 지원 시스템과 비교할 때), 공장을 계속 움직이게 하는 ‘근육’입니다. 이는 현대 제조업에서 가장 중요한 부분일 수 있으므로 올바른 제어 장치를 선택하는 데는 많은 고려가 필요하다. 이러한 장치가 더욱 통합됨에 따라 에지 컴퓨팅 및 무선 연결과 같은 추가 기능이 모터 제어 설계에 적용될 수 있다.
2. 전력 전자 장치의 전력 효율 및 밀도 최적화
전력 전자 장치 설계자들은 다축 드라이브부터 태양 에너지 저장 장치, 전기 자동차(EV) 충전소 및 EV 온보드 충전기에 이르기까지 산업 및 자동차 설계에서 전력 효율과 전력 밀도를 높이기 위해 노력하고 있다.
주요 설계 과제 중 하나는 시스템 비용을 줄이면서 실시간 제어 성능을 향상시키는 것인데, 이 과제를 해결하기 위한 일반적인 접근 방식은 초저지연 제어 루프 처리가 가능한 아날로그 및 제어 주변 장치와 함께 고도로 통합된 MCU(마이크로 컨트롤러)를 사용하는 것이다.
실시간 제어 성능: 지연 시간이 중요
몇 가지 예를 살펴보기 전에 지연 시간을 대략적으로 살펴보자. 다축 드라이브, 로봇 공학, 에너지 저장 시스템을 갖춘 태양광 인버터, 전기차 충전소 및 전기차 자체에서 제어 성능은 MCU가 신호를 얼마나 빠르게 샘플링, 처리 및 제어할 수 있는지와 직접적으로 관련이 있다. 그림 3은 아날로그-디지털 컨버터(ADC)가 신호를 측정할 때부터 CPU가 정보를 처리할 때, 그리고 궁극적으로 펄스-폭 변조기(PWM)가 전력 단계를 제어할 때까지의 실시간 신호 체인 및 신호 지연 시간을 보여준다. 초저지연 제어 루프 처리를 달성하려면 이 숫자를 가능한 한 작게 설정해야 한다.
디지털 전력의 경우, 더 높은 전력 밀도를 달성한다는 것은 DC/DC 스테이지의 스위칭 주파수를 50kHz에서 100kHz, 500kHz 등으로 증가시킨다는 것을 의미할 수 있다. PWM 주파수에 동기화된 조절 루프와 함께 100MHz에서 실행되는 MCU를 사용하는 경우, 10kHz에서는 각 PWM 인터럽트 사이에 10,000개의 CPU 사이클을 사용할 수 있으며 100kHz에서는 1,000사이클로 떨어진다. 주파수가 증가함에 따라 프로세스 제어를 감지할 수 있는 시간이 줄어들기 때문에 MCU 아키텍처를 최적화하여 실시간 신호 체인에서 가능한 모든 주기를 절약해야 한다.
-3")
[그림 3] 실시간 성능 및 지연 시간의 개념
태양광 인버터 에너지 저장 시스템에서 차세대 전력 공급 활성화
태양광 인버터 시장은 그림 4에서 볼 수 있듯이 에너지 저장 시스템(하이브리드 인버터)의 통합으로 진화하고 있다. 이는 양방향 에너지 흐름 제어라는 과제를 제시한다. 단일 칩 아키텍처에는 많은 수의 고해상도 PWM 채널과 TMS320F28P650DK C2000Tm 32비트 MCU와 같은 추가 고해상도 ADC 입력이 있는 MCU가 필요하다.
응용 분야 전반에서 재생 가능한 에너지에 대한 증가하는 요구를 충족시키기 위해 태양광 인버터는 더 높은 전력 효율과 향상된 총 고조파 왜곡 성능이 필요하다. 한 가지 접근 방식은 전원 스위치를 올바른 순서로 안전하게 켜고 끌 수 있도록 복잡한 전력 알고리즘과 복잡한 프로그래밍 가능 논리 장치 또는 필드 프로그래밍 가능 게이트 어레이와 같은 추가 외부 로직의 조합으로 구현되는 최신 다상, 다단계 인버터 전력 아키텍처로 전환하는 것이다. 이로 인해 보드 공간과 시스템 비용이 추가된다.
온보드 커스텀, 최소 데드밴드 및 불법 콤보 로직(파괴적인 온/오프 시퀀스를 방지하는 MCU 기능)을 여러 PWM 모듈에서 지원할 수 있는 MCU는 설계자가 비용을 절감하면서 외부 로직을 줄이거나 제거할 수 있는 기회를 제공함으로써 설계를 더욱 단순화할 수 있다.
또한 과전류 및 과전압 이벤트로부터 전력 컨버터를 보호하기 위해서는 PWM 장치를 통합 아날로그와 유사한 윈도우 콤퍼레이터와 긴밀하게 연결하는 것이 중요하다. 전원 토폴로지에 따라 공진 모드 컨버터 피크 전류 및 밸리 전류 모드 제어를 구현할 수 있는 PWM 장치가 있는 MCU를 선택해야 한다.
-4")
[그림 4] 에너지 저장 시스템이 통합된 태양광 인버터 아키텍처
EV 온보드 충전기에 더 쉽고 빠르게 통합 구현
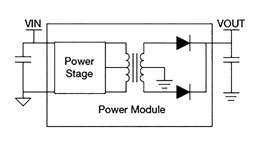
전 세계적으로 전기차의 수가 증가함에 따라 설계자는 온보드 충전기를 더욱 통합하고 비용을 절감할 수 있는 새로운 솔루션을 찾아야 한다. 일반적인 구현은 온보드 충전기 역률 보정 단계를 위한 MCU와 온보드 충전기 DC/DC 단계를 위한 MCU로 구성되며, 그 사이에 절연이 이루어진다.
단일 MCU를 구현하면 MCU로 신호를 다시 전송하는 데 필요한 절연이 증가할 수 있지만, 적은 수의 컨트롤러 영역 네트워크 트랜시버, 전압 레귤레이터, 전력 관리 집적 회로, 작동 증폭기 및 호스트 MCU로의 통신을 위한 절연 등 부품 수가 줄어들어 비용이 절감되므로 이를 상쇄할 수 있다.
그림 5은 최대 22kW의 3상 온보드 충전기 전력 스테이지 토폴로지를 제어하는 단일 MCU를 보여준다. PFC 스테이지는 2상 인터리브 토템폴이고 DC/DC 스테이지는 전계 효과 트랜지스터의 변압기 크기와 정격 전류를 줄여주는 듀얼 커패시터-인덕터-인덕터-커패시터(CLLLC)이다.
-5")
또 다른 과제는 다양한 실시간 제약 조건이 있는 여러 작업의 소프트웨어 통합이다. PFC, DC/DC, 하우스키핑 및 안전이 공존해야 하므로 소프트웨어 개발이 더욱 복잡해진다.
단일 코어 MCU에서 분산 메모리, PWM 및 아날로그 리소스를 사용하는 멀티 코어 MCU 아키텍처로 전환하면 하나의 코어는 PFC를 제어하고 다른 하나는 두 개의 CLLLC를 실행하는 등 다양한 코어에 서로 다른 제어 루프 주파수를 할당할 수 있는 기회를 창출할 수 있다. 각 코어는 서로 다른 독립 주파수로 제어 루프를 실행할 수 있다. 토템폴은 일반적으로 고정 주파수이지만 온보드 충전기의 DC/DC 전력 변환 단계(그림 3)는 변경된다. 또한 멀티코어 아키텍처로 전환하면 (코어당 각 제어 루프를 최적화할 수 있기 때문에) 보다 안정적이고 정밀한 과전류 및 과전압 보호가 가능하며, 외부 모니터링 부품의 필요성을 제거하여 비용을 절감할 수 있는 기회를 제공한다.
몇 분 만에 충전되는 전기차, 모든 가정에 설치되는 태양열 시스템과 에너지 저장 장치, 더 효율적인 로봇과 자동화로 에너지 사용량을 줄이는 공장 등 실시간 제어 MCU의 혁신은 더 깨끗하고 안전하며 효율적인 세상을 위한 발판을 마련하는 데 도움이 될 것이다.






 |






 |
MCU 100% 활용하기
조회수 216회 / 텍사스 인스트루먼트

전기차 시스템 혁신을 이끄는 GaN 기술
조회수 394회 /
자동차 인포테인먼트 클러스터 시스템 구동
조회수 271회 / Timothy Hegarty
절연 기술 개발과 고전압 설계 문제의 해결
조회수 524회 / Krunal Maniar

AEC-Q100 MSPM0 MCU를 사용하여 오토모티브 차체 전자 장치 설계 최적화
조회수 344회 / Henok Taffere

정밀 ADC로 전기차 충전기 계측
조회수 494회 / Jiyah Starks
절연형 DC/DC 바이어스 전원 솔루션
조회수 638회 / Taxas Instruments

옵토커플러를 업그레이드하자
조회수 676회 / 김태호

급성장하는 HEV/EV 시장에서 오토모티브 HVAC 설계를 최적화하는 방법
조회수 962회 / Osamah Ahmad 외 1인
PDF 다운로드
 |
회원 정보 수정
