2024 우수잡지


-MPLAB Software Updates-KR 466x58H.jpg)

AEC-Q100 MSPM0 MCU를 사용하여 오토모티브 차체 전자 장치 설계 최적화

글/Henok Taffere, TI
매년 자동차 제조업체는 안전, 비용, 사용자 환경을 개선하기 위해 설계에 더 많은 새로운 기술을 통합하고 있다. 최신 차량은 가장 혹독한 환경을 견딜 수 있는 높은 정밀도와 성능을 갖춘 많은 마이크로컨트롤러를 사용한다. 지난 몇 년 간의 시장 수요는 인간-기계 인터페이스, 윈도우 및 미러 제어, 트렁크 오프너 등의 차량 액세서리에서 소비자 환경을 개선할 필요가 있다는 것을 분명히 보여주었다. 이러한 애플리케이션은 실시간 데이터를 처리하고 상호 작용하는 장거리 버스 라인을 통해 메시지를 통신하여 해당 ECU(전자 제어 장치)를 제어하는 장치를 사용한다.
TI의 MSPM0 Arm® Cortex® 기반 M0+ MCU(마이크로컨트롤러)에는 차체 전자 애플리케이션의 시스템 요구 사항을 충족하도록 설계된 차량용 등급(AEC-Q100) MCU가 포함되어 있다. 이러한 MCU는 더 작은 패키징, 사용이 간편한 표준화된 소프트웨어, 고성능 저전력 주변 장치, 전체 스펙트럼 핀 대 핀 확장성을 매력적인 저비용으로 제공한다.
-1")
[그림 1] 스마트 트렁크 오프너
-2")
[그림 2] 윈도우 및 미러 제어 스위치
BCM 설계에 MSPM0을 선택하는 이유
• 계산: 선택적 수학 가속기가 포함된 에너지 효율적인 M0+ CPU
• 센싱: 제로 드리프트 연산 증폭기, 고속 콤퍼레이터 및 ADC를 포함한 고성능 상호 연결 아날로그 모듈
• 제어: 저전력, 범용, 고급 및 고해상도 타이머 모듈
• 패키징 확장성: 포트폴리오 간에 핀 대 핀 호환
• 통신: CAN FD, LIN, SPI, I2C, UART 및 SENT용 소프트웨어 구현으로 구성된 통합 직렬 통신 주변 장치
-3")
[그림 3] MSPM0 플랫폼 기능 및 장점
차체 전자 제어란 무엇인가? 몇 가지 공통 구성 요소란 무엇인가?
차체 전자 제어는 차량의 몇 가지 기본 ECU로, 차량에서 사용되는 다양한 인터페이스를 위한 제어 메커니즘으로 구성된다. 이러한 메커니즘의 몇 가지 예로는 트렁크 오프너, E-시프터, 윈도우 및 사이드 미러 제어 모듈이 있다. 이러한 시스템은 차량의 차체와 관련된 실시간 전자 작동을 관리 및 제어하는 역할을 하기 때문에 현대식 차량에서 필수적이다. 이러한 설계는 시스템 기능과 안전을 적절하게 사용하기 위해 차량의 다른 서브시스템과 함께 컴퓨팅하는 소형 저전력 통합 회로(IC)를 사용한다.
몇 가지 공통 구성 요소는 차체 전자 설계에서 찾을 수 있다.
• 저전력 MCU: 최소한의 전력 소비로 고성능 및 통합을 가능하게 하는 데 필요한 저전력 MCU이다. 마이크로 컨트롤러에는 시스템의 중앙 처리 장치가 포함되어 있다.
• 모터 드라이버: 모터 유형에 따라 이 IC는 PWM(전기 펄스)을 생성하거나 모터의 속도와 방향을 관리한다.
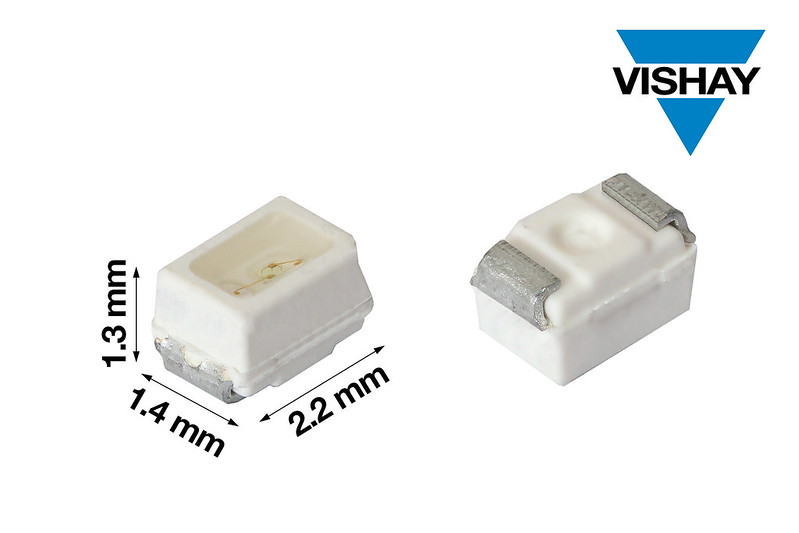
• 온도 센서: 서미스터 같은 온도 감지 구성 요소는 마이크로컨트롤러와 상호 작용하여 시스템의 주변 온도를 모니터링한다.
• 통신 인터페이스: 통신 인터페이스를 통해 서브시스템의 주변 장치 또는 주 버스의 다른 제어 유닛 간에 메시지를 전송할 수 있다.
• LED 드라이버: LED 드라이버는 마이크로컨트롤러가 보낸 정확한 주파수로 제어 신호를 수신하여 특정 컬러 디스플레이에 필요한 전류를 구동한다.
차량용 등급의 MSPM0 MCU가 차체 전자 장치 설계에 어떻게 도움이 되는지 더 잘 이해하기 위해 최신 차량 전체의 몇 가지 일반적인 애플리케이션을 살펴본다.
듀얼 윈도우 드라이브 모듈
대부분의 최신 차량에서 일반적으로 볼 수 있는 듀얼 윈도우 제어 유닛은 윈도우에 대한 전원 공급을 관리하여 윈도우를 쉽게 올리거나 내릴 수 있도록 한다. 사용자는 일반적으로 도어 패널에 위치한 스위치를 통해 윈도우 제어 모듈과 인터페이스 한다.
-4")
사이드 미러 모듈
사이드 미러 모듈은 사이드 미러의 위치 조정 및 안쪽으로 접는 등 다양한 기능을 제어하는 전자 유닛이다. 사이드 미러 모듈은 차량의 차체 제어 모듈에 연결되어 있다. 사용자는 일반적으로 운전석 근처에 위치한 제어 스위치를 통해 사이드 미러와 상호 작용한다.
-5")
전자 사이드 미러 및 윈도우 제어 설계의 MSPM0
이러한 애플리케이션의 MCU에 대한 주요 기능 요구 사항:
• PWM
• CAN FD 또는 LIN
• 12비트 ADC
• SPI 또는 I2C
• 워치독 타이머
이러한 설계에서 MSPM0 MCU는 PCB의 모든 인터페이싱 구성 요소에 대해 주 컨트롤러 및 프로세서의 중요한 역할을 한다. 활성 모드에서 소비된 전력은 실온에서 96uA/MHz이다. 대기 모드에서는 1uA의 실행 전류만 소비된다. MCU는 사용자가 스위치를 활성화할 때까지 저전류 절전 모드를 유지할 수 있다. 이 저전력 모드에서는 ADC, 콤퍼레이터, RTC 및 워치독 타이머와 같은 여러 모듈이 동시에 작동하여 전체 전력 소비를 줄일 수 있다.
메시지가 나타나면 MCU가 SPI 또는 PWM을 통해 모터 드라이버로 제어 신호를 보낸다. 이 직렬 통신 절차에서는 MCU가 호스트로 작동한다. 드라이버의 내부 레지스터를 구성하여 상태를 읽고 미러 및 윈도우의 이동을 구동하는 데 필요한 PWM 주파수를 설정할 수 있다. MSPM0G350x에는 PWM 출력에 사용할 수 있는 세 가지 타이머 유형이 포함되어 있다. 16비트 해상도 범용, 16비트 고급 제어 및 32비트 고해상도. 이러한 타이머는 동일한 전원 도메인 내에서 동기화 및 크로스 트리거 연결도 지원한다.
또한 MCU는 모터 드라이버로부터 아날로그 입력을 받아 모터를 흐르는 전류를 모니터링한다. 4MSPS 이상의 12비트 ADC 샘플 레이트를 통해 모터를 통해 흐르는 전류 측정이 효율적으로 수행될 수 있으며, 이를 통해 MCU에서 드라이버의 전류 제어 설정을 실시간으로 조정할 수 있다.
MSPM0 포트폴리오에는 5 x 5mm2의 작은 패키지에 통합 고속 CAN FD가 포함되어 있다. 이 주변 장치를 사용하면 CAN 트랜시버 및 주 버스를 통해 빠르고 안정적으로 액세스할 수 있으며, 차체 제어 장치 간의 직렬 통신이 발생할 수 있다.
스마트 트렁크 오프너
스마트 트렁크 오프너 전기 제어 유닛은 근접 센서로부터 입력을 수신하고 트렁크의 열기 및 닫기를 제어하는 데 필요한 출력을 전송한다. 이 시스템은 사용자가 차량을 물리적으로 만질 필요 없이 트렁크와 상호 작용할 수 있는 편리하고 안전한 방법을 제공한다.
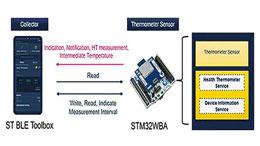
-6")
[그림 6] MSPM0 킥 투 오픈 트렁크 모듈 시스템 블록 다이어그램
트렁크 오프너 설계의 MSPM0
이러한 애플리케이션의 MCU에 대한 주요 기능 요구 사항:
• PWM
• LIN
• 12비트 ADC
• COMP(콤퍼레이터)
• I2C 또는 SPI
이전 설계와 마찬가지로 MCU는 근접 센서에서 프론트 엔드 아날로그 판독값을 수신하는 호스트 역할을 하며, 정보의 패킷을 LIN 버스로 전송하여 도어 잠금 해제를 트리거한다. 아래는 이 설계의 간단한 순서도 구현의 예이다.
-7")






 |





 |
전기차 시스템 혁신을 이끄는 GaN 기술
조회수 295회 /
자동차 인포테인먼트 클러스터 시스템 구동
조회수 200회 / Timothy Hegarty
절연 기술 개발과 고전압 설계 문제의 해결
조회수 434회 / Krunal Maniar

AEC-Q100 MSPM0 MCU를 사용하여 오토모티브 차체 전자 장치 설계 최적화
조회수 291회 / Henok Taffere

정밀 ADC로 전기차 충전기 계측
조회수 438회 / Jiyah Starks
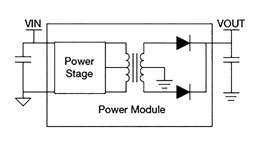
절연형 DC/DC 바이어스 전원 솔루션
조회수 577회 / Taxas Instruments

옵토커플러를 업그레이드하자
조회수 596회 / 김태호

급성장하는 HEV/EV 시장에서 오토모티브 HVAC 설계를 최적화하는 방법
조회수 906회 / Osamah Ahmad 외 1인
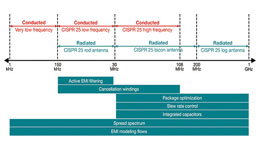
전원 공급 장치의 EMI 절감을 위한 시간 및 비용 효율적 혁신
조회수 1164회 / Yogesh Ramadass 외 2인
PDF 다운로드
 |
회원 정보 수정