전력 모듈 패키징의 혁신
글/Tom Curatolo, 수석 기술 영업 엔지니어, Vicor
-0")
시스템의 전력 전달 네트워크(PDN)는 케이블, 커넥터, AC-DC 및 DC-DC 컨버터, 레귤레이터와 같은 수동 및 능동 부품들로 구성된다. 새로운 기능 구현과 기계 및 유압 시스템의 전동화를 가능하게 하기 위해 전력 수준이 증가함에 따라, PDN 성능의 중요성이 더욱 커지고 있으며, 경우에 따라서는 PDN의 크기, 무게, 전력 손실로 인해 최종 시스템의 성능이 제한되기도 한다.
전력 시스템 설계 엔지니어들은 소형화, 경량화, 고효율을 동시에 달성하는 PDN을 설계해야 한다는 압박을 점점 더 크게 받고 있다. 이러한 목표를 달성하는 것은 최종 시스템 성능을 크게 향상시키고 OEM에게 경쟁 우위를 제공할 수 있는 선도 제품을 정의하는 핵심 요소가 될 수 있다.
40년간의 혁신
이러한 전력 시스템 설계 과제와 핵심 PDN 성능 사양의 중요성을 이해하는 것은 Vicor가 전력 시스템 기술의 최전선에 머물기 위해 지속적으로 혁신하도록 이끄는 원동력이다. 이를 위해서는 여러 수준에서의 대대적인 혁신에 대한 헌신이 필요하다.
전력 혁신의 네 가지 축:
1. 전력 전달 아키텍처
2. 전력 변환 토폴로지
3. 제어 시스템
4. 전력 모듈 패키징
각 수준은 여러 차원을 가지며, 서로 밀접하게 의존한다. 이러한 네 가지 전력 혁신 수준이 함께 작용해 전력 모듈 성능을 향상시킨다. PDN 아키텍처 설계는 모든 전력 시스템 엔지니어에게 첫 번째 단계이며, 뛰어난 아키텍처는 궁극적으로 전체 시스템 성능을 좌우할 수 있다.
아키텍처 개발은 성능 최적화를 위해 중요한 질문을 던지는 과정이다. 언제 변환하고, 언제 조정하며, 언제 절연할 것인가? PDN 내에서는 어떤 전압이 사용되고 분배될 것인가?
이 질문에 대한 답은 요구사항에 따라 달라지지만, 솔루션을 구성하는 모듈 요소는 동일하다. 고주파 스위칭(전력 변환) 토폴로지를 활용하면 수동 소자 및 자기 소자의 값과 크기를 줄일 수 있으며, 제로 전압 스위칭(ZVS) 및 제로 전류 스위칭(ZCS)과 같은 혁신적인 제어 시스템을 통해 전력 손실을 크게 줄일 수 있다.
또한 회로 기판, 자기 소자, 반도체 및 수동 소자에 적용되는 첨단 소재는 전력 손실 감소와 부품 소형화를 가능하게 한다. 그러나 이러한 모든 요소도 전력 모듈 패키징의 지속적인 혁신이 없다면 큰 영향을 미치지 못했을 것이며, 궁극적으로 전력 및 전류 밀도를 결정짓는 것은 바로 이 패키징 기술이다.
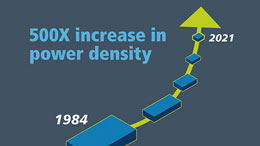
전력 모듈 패키징은 Vicor의 독보적인 차별화 요소이자, 회사 설립 초기부터 핵심 역량으로 자리 잡아 왔다. 1984년에는 형태에서 유래해 ‘브릭(Brick)’이라 불리는 모듈형 DC-DC 컨버터가 출시되었으며, 다음과 같은 혁신적인 특징을 갖췄다.
• 분산 전력 아키텍처 구현
• 고효율 준공진 포워드 컨버터 토폴로지
• 전력 손실을 줄이기 위한 제로 전류 스위칭(ZCS) 기반 주파수 변조(FM) 제어 시스템
최대 1MHz에 달하는 스위칭 주파수를 통해 수동 소자와 자기 소자의 물리적 크기를 크게 줄일 수 있었으며, 전력 손실 감소를 바탕으로 획기적인 전력 밀도를 갖춘 전력 모듈이 구현되었다. 이는 전원 공급 산업에 큰 변화를 가져왔다(그림 1).
-1")
[그림 1] 초기 브릭(Brick) 모듈이 높은 전력 밀도와 효율로 업계를 선도한 이후, 오늘날의 ChiP에 이르기까지 Vicor는 특히 전력 밀도 분야에서 전력 시스템 엔지니어를 위한 중요한 발전을 이끌어왔다.
브릭(Brick)에서 VI Chip 및 ChiP 패키징으로의 전환
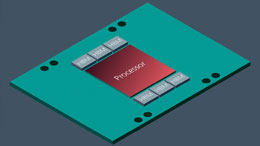
2008년, Vicor는 브릭 대비 전력 밀도를 크게 향상시키고 전력 시스템 산업을 위한 전력 부품 설계 방법론을 발전시킨 새로운 혁신 기술을 도입했다(그림 2).
-2")
[그림 2] VI Chip과 ChiP 패키징은 새로운 Factorized Power Architecture의 획기적인 발전과 토폴로지, 제어 시스템, 부품 및 소재의 지속적인 진보를 완전히 구현하는 데 필수적이었다.
1. 분산형 전력 아키텍처(FPA™)
2. 사인 진폭 컨버터(SAC™)라 불리는 새로운 고주파 토폴로지
3. 제로 전압 스위칭(ZVS) 및 제로 전류 스위칭(ZCS)
4. 새로운 패키징 소재
이 새로운 아키텍처는 고주파 스위칭 토폴로지와 ZVS, ZCS 기반 제어 시스템 개선과 결합되어 전력 손실을 다시 한 번 줄이고, 더 높은 수준의 전력 모듈 통합을 가능하게 했다. 이는 새로운 패키지인 VI Chip 개발로 이어졌다. 해당 패키지는 주요 공급업체와 협력해 개발된 특수 소재를 포함한 열 효율이 높은 몰딩 컴파운드를 사용한 완전 오버몰드 PCB 어셈블리 구조로 설계됐다.
이 모듈은 개별 몰드 캐비티에서 제조되며, 고객의 메인보드에 표면 실장이 가능하도록 J-리드 핀을 적용했다. 그 결과, 새롭게 구성된 전력 모듈 제품군은 IBM의 슈퍼컴퓨터용으로 개발된 1V 이하 고전류 프로세서를 구동하는 데 있어 획기적인 성능을 제공했으며, 이후 10년 뒤 데이터센터 및 AI 프로세서 시장에서 Vicor의 48V-to-load 리더십을 구축하는 기반이 됐다.
2015년에는 제어 시스템, 토폴로지, 부품 및 소재의 추가적인 개선을 통해 전력 손실 감소, 더 높은 주파수의 제어 시스템 및 토폴로지를 활용할 수 있도록 VIChip® 패키지가 재설계되었으며, 그 결과 전력 및 전류 밀도가 더욱 향상되었다. 이 새로운 패키지는 ChiP™(Converter housed in Package)라고 불리며, 그 구조와 제조 방식은 Vicor뿐 아니라 전력 모듈 제조 산업 전반에 새로운 기준을 제시했다.
새로운 ChiP 패키지는 양면 부품 실장 구조를 특징으로 하며, 고정 크기의 패널에서 절단되는 방식으로 제조된다. 이는 실리콘 칩이 웨이퍼에서 만들어지고 절단되는 방식과 유사하다.
전력 모듈 패키징의 핵심 특성
혁신의 네 가지 축이 Vicor의 발전을 이끌어왔지만, 전력 모듈 패키징은 회사의 기술적 전문성을 가장 뚜렷하게 구분 짓는 요소다. 컨버터 또는 레귤레이터 모듈 패키지를 세계 최고 수준으로 만들고, 고성능 전력 전달을 가능하게 하는 다섯 가지 핵심 특성은 다음과 같다(그림 3).
-3")
[그림 3] 토폴로지, 제어 시스템 및 새로운 전력 전달 아키텍처의 발전은 지난 수년간 전력 밀도를 지속적으로 향상시켜 왔으며, 초기 풀 브릭(full-brick) VI-200 DC-DC 컨버터(좌측)와 최신 적층형 CHiP GCM 및 DCM 모듈(우측)에서 볼 수 있듯이 약 2.5년마다 전력 손실을 25%씩 감소시키는 성과를 보여주었다.
• 높은 전력 및 전류 밀도
• 뛰어난 열 관리 성능
• 자기소자 통합
• 대량 PCB 조립 공정과의 호환성
• 대량 자동화 제조 공정을 통한 모듈 생산
전력 모듈 패키지 개발의 각 단계에서는 새로운 소재, 능동 및 수동 부품이 활용되었으며, 특히 더 높은 스위칭 주파수를 기반으로 한 자기 구조의 개선이 핵심적인 역할을 했다. 이러한 고주파 동작은 Vicor의 독자적인 제어 ASIC에 적용된 토폴로지 및 제어 시스템 개선을 통해 가능해졌다.
최근 이 ASIC의 4세대 제품이 출시되면서 전력 밀도는 10kW/in³, 전류 밀도는 2A/mm² 수준까지 향상되었으며, 이를 통해 AC 및 DC 고전력 프런트엔드 컨버터와 PoL(Point-of-Load) 전류 배수기 제품군이 새롭게 구현되었다. 이러한 최신 모듈형 전력 솔루션은 데이터센터와 자동차 애플리케이션에서 PDN 아키텍처 설계 방식을 근본적으로 변화시키고 있다.
전력 모듈 내부의 다층 회로 기판은 매우 복잡한 설계 구조를 갖는다. 이들은 최적의 열 전도성을 확보하고 제한된 공간 내에서 높은 전류와 전압을 처리하면서도 전력 손실을 최소화하기 위해 특수 소재를 필요로 한다.
양면 부품 실장 구조는 양쪽 면에서 열을 효과적으로 방출할 수 있게 해 성능과 전력 처리 능력을 극대화한다. 구리 도금된 ChiP는 이러한 패키징을 한 단계 더 발전시켜, 외곽을 감싸는 구리 재킷을 통해 열 관리를 크게 단순화했다.
소재 과학은 특히 수 MHz 수준의 스위칭 환경에서 전력 패키지 성능 향상에 중요한 역할을 한다.
주요 에너지 저장 코어는 전체 모듈 성능에서 핵심적인 역할을 하며, 전력 시스템 설계에서 주요 전력 손실 원인 중 하나가 될 수 있다. 코어, 권선, PCB 소재 구성은 더 높은 스위칭 주파수, 더 높은 전력 수준, 그리고 더 낮은 출력 저항(ROUT)을 달성하기 위해 지속적으로 최적화되고 있으며, 단일 모듈에서 수백 암페어 수준으로 전류가 증가하는 상황에서도 전력 손실을 줄일 수 있도록 설계된다.
에너지 저장 인덕터 또는 변압기를 전력 모듈에 통합하고 그 성능을 극대화함으로써, 전력 시스템 설계자는 외부 인덕터를 최적화해야 하는 복잡하고 시간이 많이 소요되는 과정을 줄일 수 있으며, 전체 전력 시스템의 크기도 감소시킬 수 있다.
이러한 모든 핵심 설계 요소를 구현한 전력 모듈 제품군 중 하나가 전류 배수기(current multiplier)로, 현재 고성능 컴퓨팅 애플리케이션에 사용되는 최첨단 인공지능(AI) 프로세서에 전력을 공급하고 있다. Vicor의 VTM과 MCM은 최대 1000A까지 전류를 공급할 수 있으며, 48V를 1V 이하 수준으로 직접 변환한다. 이들 장치에 통합된 평면 자기소자는 12년에 걸쳐 최적화되어 현재 2A/mm 수준의 전류 밀도를 달성했으며, 향후 더욱 향상될 예정이다.
대량 PCB 조립 공정과의 호환성
전 세계 모든 대량 생산 위탁 제조업체(CM)는 표면실장 리플로우 솔더링 공정을 사용한다. 새로운 SM-ChiP™는 도금 및 오버몰드 구조를 갖춘 패키지로, 인쇄회로기판에 표면실장 방식으로 부착되도록 설계되었으며, CM의 제조 공정 및 장비와 호환된다. 패키지의 전기적 및 열적 연결은 모듈 외곽의 도금된 캐스텔레이션 단자와 패키지 본체의 연속적인 도금 표면에 솔더링을 통해 형성된다.
대량 자동화 제조 공정을 통한 모듈 생산
ChiP는 표준 크기의 패널에서 제작 및 절단되며, 모듈 내부 PCB의 양면을 모두 활용해 능동 및 수동 부품을 실장한다(그림 4). 이러한 패널 기반 제작 및 절단 방식은 실리콘 칩이 웨이퍼에서 제조되고 절단되는 방식과 매우 유사하며, 이를 통해 공정이 단순화되고 대량 생산이 가능하며 높은 확장성을 갖는 제조 환경을 구현할 수 있다.
-4")
[그림 4] 새로운 패널 기반 제조 공정은 전력 산업에서 또 하나의 혁신으로, ChiP는 모두 동일한 크기의 패널에서 절단되어 자동화된 대량 생산 공정을 가능하게 한다.
AI·고성능 컴퓨팅을 위한 3D ChiP
ChiP 패키징의 최근 혁신은 여러 고성장 애플리케이션을 가능하게 하고 있다. 그중 가장 까다로운 분야 중 하나가 첨단 인공지능으로, 프로세서 전류가 1000A를 초과하는 수준까지 증가하고 있다. 이러한 애플리케이션에서는 PCB 구리 전력 플레인에서 발생하는 전력 분배 손실이 주요 손실 요소로 부각되며, 시스템 성능을 제한하는 요인이 되고 있다.
이러한 요구를 충족하기 위해 임피던스를 최소화할 수 있는 최적의 전력 모듈 위치는 프로세서 바로 아래이며, 전력 모듈의 출력 전력 핀을 상단 프로세서의 전력 핀 배열과 정확히 일치시키는 것이다. 그러나 이 위치는 동시에 순간적인 프로세서 전력 요구를 충족하기 위해 필요한 다수의 바이패스 커패시터가 배치되어야 하는 최적의 위치이기도 하여, 보드 레이아웃 상의 충돌을 발생시킨다.
수직 전력 전달을 위한 ChiP 적층
수직 전력 전달(VPD)의 과제는 다층 적층 기술을 통해 해결되었다(그림 5). 새로운 VPD 전력 모듈은 전류 배수기 레이어와 ‘기어박스’ 레이어로 구성되며, 기어박스 레이어는 바이패스 커패시터를 수용하고 전류 배수기의 피치를 상단 AI 프로세서의 전력 핀 배열 및 간격에 맞게 변환하는 역할을 한다.
이 새로운 다층 패키징 기술은 AI 프로세서 전력 시스템 설계자가 가장 최적의 방식으로 전력을 공급할 수 있도록 하며, 고성능 컴퓨팅(HPC) 애플리케이션에서 프로세서의 성능을 극대화할 수 있게 한다.
-5")
[그림 5] 적층형 ChiP를 활용한 첨단 AI 프로세서용 수직 전력 전달은 보드 및 기판에서의 전력 손실을 줄여 프로세서 성능을 향상시킨다.
결론
ChiP 패키징 방식은 모듈을 구성하는 모든 개별 부품과 요소를 소형화하는 데 초점을 맞추고 있다. Vicor가 성능 개선을 지속함에 따라, ChiP 패키징은 새로운 수준의 혁신을 계속해서 보여줄 것이다. 지난 40년 동안 Vicor는 자기소자와 전력 엔지니어링의 한계를 끊임없이 확장하며, 고객의 혁신적인 기술 구현을 뒷받침하는 차세대 고전력 밀도 제품을 지속적으로 제공해 왔다. 이러한 흐름을 바탕으로 다섯 가지 핵심 축을 나침반 삼아, 그 여정은 아직 끝나지 않았다.
기사입력 : 2026-04-30
-
전력 모듈 패키징의 혁신
작성자 : Tom Curatolo -

모바일 로봇의 성능을 최적화하는 고밀도 모듈형 전력 공급 네트워크
작성자 : Anna Giasson 외 1인 -

전력 모듈을 활용해 전기차의 고전압 프리차지 회로를 제거하는 새로운 ...
작성자 : Patrick Kowalyk -

자동차용 800V에서 48V SELV로의 전환을 가속하는 전력 모듈
작성자 : Patrick Wadden -

48V로 가속하는 전력 전자 혁신
작성자 : Max Maxfield -

고밀도 전력 모듈로 EV 전력 시스템 설계 간소화 및 소형화
작성자 : 그렉 그린 -

새로운 우주 애플리케이션을 위한 고전력 밀도 및 저잡음 구현
작성자 : Ken Coffman 외 1인 -

소형 전력 모듈로 차량의 전동화 가속
작성자 : 바이코 -

생명 구조 목적의 각종 재료와 서비스를 보호하고 제공하는 혁신적 솔루션
작성자 : 바이코 -
생성형 AI - 극히 전력 소모가 큰 컴퓨팅 애플리케이션의 전력 소모 줄이기
작성자 : Maury Wood -

자동차 전기화: 48V가 12V 대체
작성자 : 바이코 코리아 -

전동화 트렌드를 주도하는 소형 전원 모듈
작성자 : 바이코












|






대표전화 031-620-0071 Managed by SemiNet