2024 우수잡지


-MPLAB Software Updates-KR 466x58H.jpg)


Bluetooth 5.1 지원 플랫폼을 사용하여 정밀 자산 추적 및 실내 포지셔닝 지원

글/Digi-Key 북미 편집자 제공
물류 회사에서 실시간으로 자산을 추적하여 공급망 효율을 높이고자 모색하고 있고, 기업에서 직원 및 고객 움직임을 모니터링하여 생산성을 향상시키고자 함에 따라 위치 서비스에 대한 수요가 증가하고 있다. Bluetooth의 수신한 신호 강도 표시기(RSSI)를 사용하여 알려진 고정 지점까지의 거리를 예측할 수 있지만 이 기술은 대체로 실내 포지셔닝 시스템(IPS), 자산 추적과 같은 응용 분야에 적용될 만큼 충분히 정밀하지 않다. 하지만 Bluetooth 사양으로 업데이트하면 더 정밀한 진행 경로를 제공할 수 있다.
특히, 최신 버전의 Bluetooth 핵심 사양(v5.1)(‘Bluetooth 5.1 방향 찾기’로 표시됨)에서는 개발자가 2차원 또는 3차원에서 Bluetooth 송신기 위치를 쉽고 정확하게 파악할 수 있도록 도래각(AoA) 및 발사각(AoD) 방향 찾기 기능을 추가했다.
RF 방향 찾기 기술
RSSI 기반 무선 주파수(RF) 방향 찾기는 신호 강도를 기준으로 대략적인 거리를 제공한다. 여러 지점에서 여러 번 거리를 측정하여 정확도를 높일 수 있다. RSSI의 주요 이점은 장치당 안테나가 하나만 필요하기 때문에 안테나 어레이의 복잡성, 비용, 크기 문제가 없다는 점이다. 단점은 3m ~ 5m의 정확도를 제공하여 정밀도가 낮다는 점이다.
두 번째 일반 방향 찾기 기술은 도착 시간(ToA)이라고 하며 단일 송신기에서 원격 단일 수신기까지 무선 신호의 이동 시간을 나타낸다. 다시 말해 이 방법은 장치당 안테나가 하나만 필요하지만 각 장치가 매우 정확한 동기화 클록을 지원해야 한다는 단점이 있다. ToA 시스템의 위치 정확도는 약 1m이다.
Bluetooth 5.1의 출시로 Bluetooth SIG(특별 분과 위원회)는 AoA 및 AoD를 기반으로 하여 세 번째 방향 찾기 기술을 지원하기로 했다. 수신 장치에서는 AoA를 사용하여 개별 물체의 도래각을 추적하고, AoD를 사용하여 여러 비콘의 각도와 해당 위치를 활용하여 공간 내에서 자체 위치를 계산한다(그림 1).
-1")
[그림 1] AoA 방향 찾기 방법(왼쪽)에서 자산은 신호의 도래각을 측정하는 AoA 로케이터에 자체 위치를 동보 통신(TX)으로 제공한다. AoD 방법(오른쪽)에서 비콘은 AoD 정보를 전송하고 모바일 장치는 비콘 신호를 수신(RX)하고 위치를 계산한다. 각 경우에 수신 장치는 송신기의 방향을 계산할 수 있는 컴퓨팅 성능이 필요하다. (이미지 출처: Silicon Labs)
Bluetooth 저에너지(BLE) 제품에 전용 AoA 및 AoD 솔루션을 이미 제공하고 있는 일부 기업이 있었기에 Bluetooth 5.1에 방향 찾기 기능이 포함되도록 결정할 수 있었다. Bluetooth 5.1 핵심 사양으로 업데이트하면 개발자가 RF 방향 찾기를 활용하여 BLE 패킷에서 ‘IQ’ 신호 데이터(동상 및 직각 위상 정보)를 손쉽게 추출할 수 있다. 즉, 개발자가 위치 서비스 응용 제품을 쉽게 구현할 수 있다.
예를 들어, AoA 방법은 송신 BLE 트랜시버를 추적하는 데 적합하다. 단일 안테나를 사용하여 트랜시버에서 방향 찾기 지원 패킷을 전송하면 다중 안테나 ‘로케이터’에서 패킷을 수신한다. 로케이터는 어레이의 각 활성 안테나를 전환하면서 신호 패킷에서 IQ 데이터를 샘플링하여 어레이 내 각 안테나에서 신호 송신 안테나까지 거리 차이로 인한 신호의 위상차를 감지한다. 그러면 포지셔닝 엔진에서 위상차 정보를 이용하여 신호가 수신된 각도와 송신기의 방향을 결정한다(그림 2).
-2")
[그림 2] 각 안테나의 신호 위상(θ), 파장(λ) 및 인접 안테나 간 거리(d)를 알고 있는 경우 무선 신호의 도래각을 계산할 수 있다. (이미지 출처: Bluetooth SIG)
두 개 이상의 로케이터에서 계산된 신호 방향을 결합하여 송신기 위치를 정확히 지정할 수 있다(그림 3).
-3")
[그림 3] 두 고정 로케이터에서 신호의 AoA를 계산하여 3차원에서 송신 자산의 위치를 계산할 수 있다. 로케이터의 절대 좌표를 알고 있는 경우 송신 자산의 절대 좌표도 계산할 수 있다. (이미지 출처: Silicon Labs)
AoD 방법에서는 상황이 반전된다. 이 시나리오에서 안테나 어레이를 포함하는 장치는 각 안테나를 통해 신호를 전송한다. 어레이 내 안테나의 각 신호 패킷이 수신기의 신호 안테나에 도달하면 송신기에서 이동된 거리 차이로 인해 이전 신호에서 위상이 변이된다(그림 4).
-4")
[그림 4] AoD 방법에서는 어레이 내 안테나의 각 신호 패킷이 수신기의 신호 안테나에 도달하면 송신기에서 이동된 거리 차이로 인해 이전 신호에서 위상이 변이된다. (이미지 출처: Bluetooth SIG)
수신 장치의 안테나는 신호 패킷에서 IQ 샘플을 가져온 후 포지셔닝 엔진에 전달한다. 그러면 포지셔닝 엔진에서 데이터를 사용하여 신호가 수신된 각도와 송신기의 방향을 결정한다. 이 시스템은 실내 네비게이션과 같이 송신기가 고정 기준점이고 수신기가 소비자의 스마트폰 등인 응용 분야에 적합하다.
Bluetooth 5.1로 업데이트
Bluetooth 5.1을 사용하려면 RF 소프트웨어 프로토콜(또는 ‘스택’)을 변경하고 칩 제조업체에 따라 일부 하드웨어(무선) 개선 사항을 적용해야 한다. 먼저 수정된 프로토콜에서는 방향 찾기에 사용되는 모든 Bluetooth 패킷에 CTE(연속 톤 확대)를 추가한다. 패킷은 표준 BLE 통신에 사용될 수 있도록 수정되지 않는다.
CTE는 Bluetooth 캐리어 주파수 + 250kHz 또는 500kHz (BLE의 높은 처리량 모드를 사용하는 경우)에서 16μs~160μs 동안 전송되는 변조되지 않은 순수 신호음이다. 신호음은 수신기에서 변조 교란 효과 없이 IQ 데이터를 추출하는 데 충분한 ‘1초’ 전송 길이의 ‘백색화되지 않은’ 시퀀스로 구성된다. CTE 신호는 마지막에 전송되므로 패킷의 순환 중복 검사(CRC)에는 영향을 주지 않는다.
사양에 추가된 두 번째 중요한 기능은 개발자가 프로토콜을 구성하여 IQ 샘플링을 수행하기 훨씬 쉽게 해준다. 이 구성에는 정밀한 위치 예측에 필요한 샘플 타이밍 및 안테나 스위칭 설정이 모두 포함된다.
다양한 IQ 샘플링 타이밍 구성을 채택할 수 있지만 일반적으로 각 안테나의 레퍼런스 기간 내에 IQ 샘플이 1μs 또는 2μs마다 하나씩 기록되고 결과는 BLE SoC의 RAM(랜덤 액세스 메모리)에 기록된다. 어레이 내 여러 안테나에서 샘플링되는 수신 신호의 위상이 어떻게 변경되는지를 보여준다(그림 5).
-5")
[그림 5] 단일 송신기의 신호가 안테나에 도착할 때 다른 위상을 나타내고 소스로부터 거리가 달라진다. (이미지 출처: Bluetooth SIG)
위치 서비스 응용 제품을 구축하는 첫 번째 단계에서는 IQ 샘플을 기록한다. 작업을 완료하기 위해 개발자는 응용 분야에 사용되는 로케이터 및 비콘에 가장 적합한 안테나 어레이를 설계하거나 선택하고 방향 찾기를 계산하는 데 필요한 복잡한 알고리즘에 대처해야 한다.
신호 방향 계산
방향 찾기에 사용되는 안테나 어레이는 일반적으로 ULA(균일 선형 어레이), URA(균일 직사각형 어레디), UCA(균일 원형 어레이)의 세 어레이 유형으로 분류된다. 이름에서 알 수 있듯이 선형 어레이는 1차원이고, 직사각형 및 원형 어레이는 2차원이다. ULA가 설계하여 구현하기 가장 쉽지만 추적되는 장치가 항상 동일한 평면에서 이동한다는 가정하에서만 방위각을 계산할 수 있다는 단점이 있다. 그렇지 않은 경우 정밀도가 약화된다. URA 및 UCA는 방위각과 고도각을 모두 안정적으로 계산할 수 있다(그림 6).
-6")
[그림 6] AoA 및 AoD 방향 찾기 기술에서는 일반적으로 선형, 직사각형, 원형으로 분류되는 안테나 어레이를 사용한다. 각 유형의 어레이는 고도 및 방위각에 대한 정보를 가져올 수 있지만 직사각형 유형과 원형 유형이 더 안정적인 방위각 데이터를 제공한다. (이미지 출처: Silicon Labs)
방향 찾기에 사용할 안테나 어레이를 설계하는 것은 간단하지 않다. 예를 들어, 동일한 어레이에 여러 안테나를 배치할 경우 각 어레이가 상호 결합을 통해 상호 응답을 방해한다. 이러한 효과를 해결하기 위해 예측 알고리즘에서 어레이 응답을 미리 정의해야 한다. 예를 들어, 널리 사용되는 상용 알고리즘에서는 어레이가 동일한 두 하위 어레이로부터 어레이가 형성된다고 산술적으로 가정한다. 안테나에 대한 지식이 부족한 경우 다행히도 정의된 특성을 갖춘 상용 안테나 어레이 제품을 사용할 수 있다.
효과적인 안테나 어레이는 정확한 IQ 샘플을 수집한다. 하지만 원시 데이터로는 신호 방향을 결정하는 데 충분하지 않다. 따라서 다중 경로 수신, 신호 분극, 전파 지연, 잡음, 지터 등을 고려하도록 데이터를 처리해야 한다.
RF 방향 찾기가 새로운 분야가 아니므로 실제 응용 분야에서 획득한 IQ를 기반하여 도래각을 예측하는 몇 가지 수학적 기술이 확립되어 있다. 플랫폼 정의(즉, 수신 어레이에서 도착하는 방출(협대역) 신호의 도래각 예측)는 간단하지만, 해결하는 데 필요한 수학은 그렇게 간단하지 않다.
Bluetooth 5.1 패킷 아키텍처
신호의 이 부분에 대해 안테나에서 (Bluetooth 데이터를 전달하는 데 일반적으로 사용되는 변조된 주파수 대신) 정주파를 수신하도록 Bluetooth 5.1 패킷에는 디지털 ‘1s’를 구성하는 CTE가 포함되어 있다. 또한 이 데이터 문자열이 백색화(즉, 역상관)되지 않다. CTE 신호를 통합하는 패킷을 수신하도록 안정적으로 구성된 Bluetooth 저에너지(LE) 무선 통신은 CTE 기간 동안 IQ 샘플링을 수행하여 진행된다. 신호 IQ 샘플은 데카르트 좌표로 표현되는 신호의 진폭 및 위상 각도로 구성된다(그림 7).
-7")
[그림 7] 방향 찾기 응용 제품에서 어레이의 각 안테나에 대해 Bluetooth 패킷의 CTE 부분 동안 위상 각도 및 진폭 IQ 샘플링을 수행하는 수신 Bluetooth LE 장치를 시작한다. 이러한 샘플은 (I,Q) 데카르트 좌표로 표시된다. (이미지 출처: Bluetooth SIG)
Bluetooth v5.1 코어 사양의 세부 사항이 Bluetooth LE 컨트롤러로 변경되어 AoA 및 AoD 기술을 통해 연결(‘페어링’) 또는 무연결 통신을 사용할 수 있다. 하지만 AoA는 일반적으로 자산 추적과 같은 연결된 응용 분야에서 사용되고, AoD는 IPS와 같은 무연결 응용 분야에서 사용된다. 연결된 방향 찾기에서는 끝에 CTE가 추가된 표준 Bluetooth 5.1 패킷을 사용한다. 반대로 무연결 방향 찾기에서는 Bluetooth 주기적 애드버타이징 패킷에 추가된 CTE를 사용한다(그림 8).
-8")
[그림 8] CTE의 위치와 기간을 보여주는 Bluetooth 5.1 패킷 구조. 연결된 응용 분야에서는 CTE를 표준 패킷에 추가하고, 무연결 응용 분야에서는 애드버타이징 패킷을 사용한다. (이미지 출처: Bluetooth SIG)
연결 시나리오와 무연결 시나리오 모두에서 개발자는 송신기에서 CTE를 시작하고 수신기에서 IQ 샘플링을 수행하기 위해 몇 가지 설정 및 구성 단계를 수행해야 한다. AoA 또는 AoD 기반 응용 분야를 선택하면 정확한 공정이 결정된다.
방향 찾기 솔루션 빌드
AoA는 송신기는 모바일 항목(예: 간단한 저비용 태그)이고 수신기(또는 로케이터)는 고정 기준점인 자산 추적과 같은 응용 분야에 적합하다. 이 구현은 태그가 단일 안테나(어레이 아님)를 사용하여 Bluetooth 5.1 프로토콜 패킷을 전송하는 데에만 필요하고, 궁극적으로 송신기 위치를 결정하는 계산 집약적인 알고리즘을 실행하는 데에는 필요하지 않다는 이점이 있다.
자산 추적 시스템의 태그 설계에서는 상대적으로 간단한 무선 주파수(RF) 설계 원칙을 따르지만 CTE를 포함하도록 패킷을 구성하려면 태그에 Bluetooth 5.1 트랜시버가 필요하다. 트랜시버를 선택할 때 Bluetooth LE 코딩 PHY (Bluetooth 5 기술의 장거리 기능을 구현하는 데 필요한 무선 통신)를 통해 CTE를 전송할 수 없다는 사실에 유의해야 한다. 대신 코딩되지 않은 유형의 PHY를 선택해야 한다.
Dialog Semiconductor의 DA14691 Bluetooth 5 LE SoC를 비롯한 일부 상용 Bluetooth 5.1 제품을 위치 서비스 응용 분야에 사용할 수 있다. 이 칩은 ArmⓇ CortexⓇ-M33 마이크로 프로세서에 의해 구동되고 512킬로바이트 RAM을 포함한다. Dialog에서는 DA14691에 사용 가능한 Bluetooth 5.1 스택을 제공했다. 또한 Silicon Labs는 EFR32BG13 Bluetooth LE SoC용 Bluetooth 5.1 스택을 출시했다. 이 칩은 64킬로바이트 RAM 및 512킬로바이트 플래시가 탑재된 Arm Cortex-M4 마이크로 프로세서를 사용한다. Nordic Semiconductor는 nRF52811 형태의 새로운 ‘방향 찾기’ 하드웨어 및 소프트웨어 솔루션을 출시하여 한 단계 더 나아갔다. Bluetooth LE SoC는 Bluetooth 5.1과 호환되며 Arm Cortex M4 마이크로 프로세서를 Nordic 고급 nRF52840 장치의 다중 프로토콜 무선 통신과 통합한다. 이 칩은 192킬로바이트 플래시와 24킬로바이트 RAM을 포함한다.
이러한 장치는 Bluetooth 방향 찾기 응용 분야의 송신기 및 수신기에 적합하다. 각 장치는 CTE 전송을 지원하며 송신기의 안테나 레이아웃을 지정하는 프로파일 레벨 정보를 활용하여 IQ 샘플을 캡처할 수 있다. 이론적으로 이러한 장치는 트랜시버의 위치에서 수신 무선 신호의 입사각을 처리하는 데 필요한 복잡한 계산도 수행할 수 있다. SoC에서 사용되는 Arm Cortex-M33 및 M4 프로세서는 상대적으로 더 강력하지만, 복잡한 방향 찾기 알고리즘을 실행하는 중에 무선 프로토콜 동시 감시에 참여할 경우 응용 제품의 성능이 저하될 수 있다.
응용 분야에 필요한 성능 및 대기 시간에 따라 개발자는 응용 소프트웨어를 위해 특별히 추가 RAM 및 플래시에 액세스하는 동반 프로세서를 고려할 수 있다. 예를 들어, Nordic의 nRF52811은 내부 집적 회로(I2C) 및 직렬 주변 장치 인터페이스(SPI)를 통해 동반 프로세서와 연결하도록 설계되었다.
추가적인 설계 문제는 비용 절감을 위해 Bluetooth LE SoC는 일반적으로 어레이에서 각 안테나를 체계적으로 작동하는 데 필요한 스위칭 기능 또는 여러 안테나 포트를 제공하지 않는다는 것이다. 따라서 Bluetooth LE SoC의 단일 안테나 포트를 어레이의 여러 안테나에 연결하고 안테나를 전환하면서 각 안테나로부터 IQ 데이터를 수집하려면 RF 스위치가 필요하다(그림 9).
-9")
[그림 9] AoA 방향 찾기 자산 추적 시스템의 태그에서는 단일 안테나와 기존 Bluetooth LE SoC를 사용하여 CTE를 통해 Bluetooth 5.1 패킷을 전송한다. 주요 계산은 시스템의 다중 안테나 로케이터 측에서 수행된다. 이때 로케이터에서 수집된 신호 데이터가 방향 찾기 알고리즘을 실행하는 위치 엔진에 공급된다. (이미지 출처: Bluetooth SIG)
수신기에서 IQ 데이터를 통해 어레이의 각 안테나에서 단일 송신 안테나까지 거리 차이로 인한 신호의 위상차를 감지하려면 안테나 어레이가 필요하다. 각 안테나의 위상 각도 차이에 따라 AoA 또는 AoD가 결정된다.
안테나 설계는 일반적으로 ULA(균일 선형 어레이), URA (균일 직사각형 어레이), UCA(균일 원형 어레이) 유형 중 하나로 분류된다. 안테나 어레이를 설계하려면 많은 경험이 필요하므로, 개발자는 앞에서 설명한 대로 대량으로 구성할 경우 최적 어레이 구성과 부품 명세서(BOM) 제공을 모두 제3자 전문가에게 위임하는 것이 더 효율적이다.
안테나 어레이, 동반 프로세서, 추가 메모리 및 안테나 관리 요구 사항으로 인해 자산 추적 솔루션의 로케이터 측 복잡도와 비용 및 전력 소비가 증가한다. 이점은 로케이터가 일반적으로 고정 위치에 유지되므로 본선 전력으로 구동할 수 있다는 것이다. 대부분의 경우 태그 수에 비해 상대적으로 적은 수의 장치가 필요하다.
AoD 구현은 조금 더 복잡하다. 이 시나리오에서는 안테나 어레이를 통합하는 송신기이다. 수신기는 단일 안테나에서 측정을 수행하고 원격 송신기에 있는 안테나 어레이의 설계 세부 사항을 사용하여 특정 안테나를 통해 측정하는 방식으로 IQ 샘플링을 수행한다.
AoD 구현에서는 고정 로케이터 비콘에서 비콘 신호를 전송하기 위해 Bluetooth 5.1 트랜시버, RF 스위치 및 여러 안테나가 필요하지만, 링크의 이 측면에서는 신호 분석이 수행되지 않으므로 AoA 구현에 추가 프로세서 및 메모리가 필요하지 않다. 하지만 모바일 수신기의 경우 단일 안테나만 있으면 되지만 방향 찾기 계산을 수행하려면 하드웨어 및 소프트웨어가 필요하다(그림 10). 예를 들어, IPS 응용 분야에서는 작업을 완료하는 데 충분한 프로세서 및 메모리 리소스를 갖춘 Bluetooth 5.1 호환 스마트폰을 수신기로 사용할 수 있다.
-10")
[그림 10] AoD 방향 찾기 IPS 시스템에서 고정 비콘은 안테나 어레이를 사용하여 CTE를 통해 Bluetooth 5.1 패킷을 전송한다. 기본 계산은 모바일 장치(예: 소비자의 스마트폰)에서 수행된다. (이미지 출처: Bluetooth SIG)
결론
Bluetooth 5.1 코어 사양에 적용된 개선 사항으로 인해 CTE 및 IQ 샘플링을 사용하여 방향을 찾는 데 필요한 원시 데이터가 생성된다. 이 사양에서는 검증된 엔지니어링 기술을 사용하여 신호 방향을 찾고 인터페이스, 구성 및 상호 작용을 표준화한다. 이 외에도 Bluetooth 솔루션을 제공하는 모든 칩 벤더에서 이제 정확한 방향 찾기를 상호 운용할 수 있다는 이점이 있다.
개발자가 Bluetooth 방향 찾기를 활용하는 시스템 구성을 빠르게 익힐 수 있도록 칩 제조업체들이 하드웨어 솔루션, 소프트웨어, DK 및 SDK를 빠르게 제공하고 있다. 상용 자산 추적 및 IPS 응용 분야 특히, 안테나 어레이 및 위치 엔진 펌웨어 설계에서는 여전히 높은 수준의 개발 전문 지식이 필요하지만, 머지않아 Bluetooth 방향 찾기 프로파일에서 이 문제가 더욱 완화될 것이다.
참고 자료
[1] Bluetooth Direction Finding: A Technical Overview, Martin Wooley, Bluetooth SIG, March 2019.
[2] Understanding Advanced Bluetooth Angle Estimation Techniques for Real-Time Locationing, Sauli Lehtimaki, Silicon Labs, 2018
[3] 1: Bluetooth Direction Finding: A Technical Overview, Martin Wooley, Bluetooth SIG, March 2019.




 |





 |
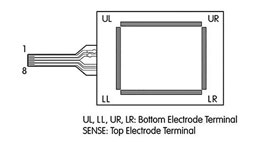
안정적인 터치스크린을 빠르게 구현하는 방법
조회수 78회 / Steven Keeping
Bluetooth 5.3을 Edge IoT 설계에 빠르고 비용 효율적으로 추가하는 방법
조회수 204회 /

적절한 안전 컨트롤러 선택의 복잡성 해결
조회수 78회 / Jeff Shepard
반도체 자동화 테스트 장비에 SSR을 사용하는 방법
조회수 85회 / Jens Wallmann
항공 우주 및 방위 산업의 적응형 SDR 통신 시스템에서 민첩한 RF 트랜...
조회수 350회 / Stephen Evanczuk
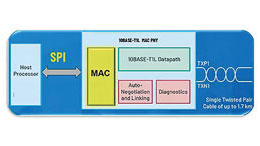
10BASE-T1L을 통한 건물 자동화 혁신
조회수 185회 / Rolf Horn

다기능 전원 공급 장치를 사용하여 지능형 화재 안전 및 보안 시스템 신...
조회수 327회 / Art Pini

전력 소자 구동기의 선택 및 시작하는 방법
조회수 532회 / Bill Schweber
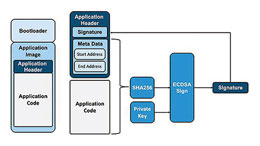
DSC와 MCU를 사용하여 내장형 시스템 보안을 보장하는 방법
조회수 532회 / Stephen Evanczuk
PDF 다운로드
 |
회원 정보 수정
