2024 우수잡지


-MPLAB Software Updates-KR 466x58H.jpg)


하드웨어-소프트웨어 콤보를 통해 BLDC 모터를 1시간 이내에 구동 및 실행

글/Jacob Beningo, Digi-Key 북미 편집자
방위, 산업 및 로봇 공학 업계에는 브러시리스 DC(BLDC) 모터를 사용하는 내장형 시스템이 요구되는 많은 응용 제품이 있다. 모터 회전은 사소해 보일 수도 있지만 모터 구동, 토크, 전기적 특성, 전자기 속성, 전류 피드백 측정 등에 대한 개발자의 기대가 높아지면서 프로젝트가 느려질 수 있는 복잡한 문제가 되고 있다.
여기서는 최소한의 부품으로 응용 제품의 전체 동작 범위를 원활하게 제어하여 모터를 구동하는 알고리즘을 실행하는 데 적절한 하드웨어를 이미 선택했다고 가정한다.
개발 시간을 크게 단축하고 개발자가 모터 제어의 세부 사항을 조사하는 부담에서 벗어나 최종 응용 제품에 집중할 수 있도록 일체형 하드웨어 및 소프트웨어 패키지 형태의 지름길이 필요하다.
이 기사에서는 마이크로 컨트롤러 및 개발 키트 하드웨어를 InstaSPIN™ 자속 기준 모터 제어기 소프트웨어 및 도구와 결합하는 Texas Instruments의 패키지를 소개한다. 그런 다음 현장 경험이 없는 개발자가 이 조합을 활용하여 모터 파라미터를 쉽게 결정하고 복잡한 BLDC 모터를 1시간 이내에 구동할 수 있는 방법을 보여준다.
InstaSPIN-FOC의 정의 및 사용 편의성
Texas Instruments InstaSPIN 솔루션만의 고유한 특징은 개발자가 처음부터 시작하여 모터를 구동하는 데 1시간도 걸리지 않는다는 것이다. 실제로 이 솔루션을 한 번이라도 사용해 본 적이 있는 개발자는 10분 이내에 모터를 구동하여 실행할 수 있다. 또한 이 키트에서는 인코더 대신 자속 기준 제어(FOC)를 사용하므로 개발자는 전력과 접지를 모터에만 연결한 후 각 구동 위상을 연결해야 한다. 그러면 전기적인 측면에서 준비가 완료되었다. 인코더 또는 다른 복잡한 전자 장치가 필요하지 않다.
물론 백 EMF 제로 크로스 타이밍과 같이 센서 또는 인코더를 사용하지 않는 FOC 이외의 다른 제어 메커니즘도 있다. 하지만 InstaSPIN은 모터의 플럭스를 모니터링하여 모터를 정류할 시기를 결정한다. 개발자는 플롯 창에서 플럭스 신호를 확인하고 “플럭스 임계값” 슬라이더를 설정하여 모터를 정류할 플럭스 수준을 지정한다. 또한 표시되는 위상 전압 및 전류 파형을 관찰하여 최적 정류를 확인할 수 있다.
InstaSPIN-FOC 솔루션의 네 가지 주요 부분은 다음과 같다.
* 마이크로 컨트롤러 기판
* 모터 구동기 기판
* InstaSPIN-FOC 그래픽 사용자 인터페이스(GUI)
* BLDC 모터
마이크로 컨트롤러 기판은 FOC 알고리즘을 스마트하게 실행하고 다른 모터 위상을 켜고 끄는 시기를 모터 구동기에 알려주고, 개발자가 플럭스 수준 및 기타 파라미터를 볼 수 있도록 GUI 통신을 처리한다. 모터 구동기는 실제 모터를 구동하는 인터페이스를 제공한다. 여기에는 마이크로 컨트롤러를 높은 전압으로부터 보호하고 측정하고 모터 결함을 감지하는 전기 회로가 포함된다.
InstaSPIN-FOC GUI는 Texas Instruments의?온라인 개발 갤러리에 있는 범용 GUI이다. 개발자는 웹 브라우저에서 직접 GUI를 실행하거나 로컬로 실행 가능한 버전을 컴퓨터로 다운로드할 수 있다.
마지막으로 실제 3상 영구 자석 BLDC 모터가 있다.
각 영역을 자세히 살펴보고 BLDC 모터를 가동하여 실행하기 위한 잠재적 하드웨어 솔루션을 알아보자.
BLDC 모터 구동기 및 마이크로 컨트롤러
개발자가 BLDC 모터를 구동하기 위해 선택할 수 있는 다양한 솔루션이 있으므로 설계자는 너무 멀리 볼 필요도 없다. TI의?InstaSPIN-FOC 및 MotorControl?SDK는 LAUNCHXL-F280049C TMS320F280049C LaunchPad(그림 1) 및 BOOSTXL-DRV8323RS LaunchPad 부스터 팩과 결합한다. TMS320F28049C LaunchPad는 기판 실장 XDS110 디버거, 확장 헤더 및 F280049CPMS TMS320F280049C Piccolo™ 마이크로 컨트롤러를 포함하는 저가형 개발 기판이다.
-1")
[그림 1] TMS320F280049C LaunchPad에는 응용 제품별 하드웨어에 사용 가능한 두 부스터 팩을 구동하는 전자 장치, F280049C Piccolo 마이크로 컨트롤러 및 분리된 USB XDS110 디버깅 프로브가 포함되어 있다. (이미지 출처: Texas Instruments)
TMS320F280049C 마이크로 컨트롤러는 C2000 마이크로 컨트롤러 코어를 사용하며 256Kbytes 플래시와 100Kbytes RAM을 포함하고 100MHz로 실행된다. 또한 TMS320F280049C는 TI의 FOC 모터 제어 알고리즘이 ROM에 내장되어 있으므로 개발자가 중요한 코드 공간을 낭비할 필요가 없다.
TMS320F280049C LaunchPad 외에도 개발자가 TMS320F280049C 마이크로 컨트롤러를 활용할 수 있는 방법이 있다. TMS320F280049C 마이크로 컨트롤러를 위한 TMDSCNCD280049C?제어 카드도 있다(그림 2). 이 카드는 시제품 제작 단계에서 사용하거나, 응용 제품에서 사용 중인 마이크로 컨트롤러를 유연하게 교체하거나 향상된 확장성을 원하는 개발자가 사용할 수 있다. 개발자는 마이크로 컨트롤러의 I/O에 액세스하는 데 사용하는 도킹 스테이션에 제어 카드를 배치할 수 있다.
-2")
[그림 2] TMS320F280049C 제어 카드는 도킹 스테이션에서 마이크로 컨트롤러의 I/O에 액세스하는 데 사용할 수 있는 소규모 모듈 패키지에 모터 제어 기능을 제공한다. (이미지 출처: Texas Instruments)
DRV8323RS LaunchPad 부스터 팩은 TMS320F280049C LaunchPad의 상단에 실장되어 BLDC 모터를 구동하는 데 필요한 추가 하드웨어를 설치하는 확장 기판이다(그림 3).
-3")
[그림 3] DRV8323RS LaunchPad 부스터 팩에는 BLDC 모터를 구동하기 위한 모터 구동 컨트롤러, FET 및 추가 회로망이 포함되어 있다. (이미지 출처: Texas Instruments)
DRV8232RS 기판은 사이트 1 또는 사이트 2 확장 영역에 실장되지만, MotorControl SDK 사례에서는 사이트 1 위치에 있는 것으로 가정한다. 개발자는 세 가지 스타일의 단자 커넥터를 통해 BLDC 모터를 기판에 연결한 다음 기판에 모터를 구동하기 위한 외부 전력을 공급할 수 있다. 또한 DRV8232RS LaunchPad 부스터 팩 TMS320F280049C 기판에 전력을 공급한다. 기판에는 전력이 켜져 있는지 나타내는 LED와 결함 감지 LED가 포함되어 있다.
DRV8232RS LaunchPad 부스터 팩의 중심에는?DRV8230?3상 스마트 게이트 구동기가 있다. 게이트 구동기는 로우사이드 전류를 감지하고 최대 60V 정격으로 MOSFET을 직접 구동한다.
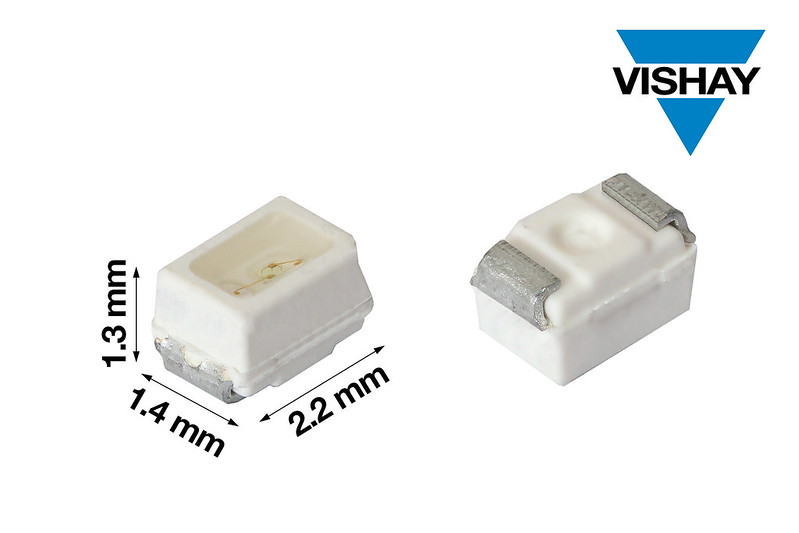
개발자는 TMS320F280049C LaunchPad 및 DRV8232RS LaunchPad 부스터 팩을 사용하여 광범위한 BLDC 모터를 구동할 수 있다. 시작하는 데 유용한 모터로는 Trinamic의 QBL4208-41-04-006이 있다(그림 4).
Trinamic 모터는 24V 공급을 지원하고, 최대 4000RPM으로 회전하며, 62.5mNm 토크를 제공한다.
-4")
[그림 4] Trinamic QBL4208-41-04-006 4000 RPM BLDC 모터는 24V 공급을 지원하고 62.5mNm 토크를 생성한다. (이미지 출처: Trinamic Motion Control GmbH)
개발자가 BLDC 모터 제어를 시작하는 데 필요한 최소한의 사양이 준비되어 있다면 다음 단계에서는 InstaSPIN-FOC GUI를 사용하여 모터의 파라미터를 식별하는 방법을 살펴보자.
BLDC 모터 파라미터 식별 및 모터 작동
InstaSPIN-FOC GUI로 모터를 구동하기 전에 속도 또는 토크로 FOC를 제어할 수 있도록 모터의 특성을 이해해야 한다. 이렇게 하려면 알고리즘에서 다음과 같은 특성을 알아야 한다.
* 저항
* 유도 용량
* 모터 플럭스
* 전류 자화
이러한 모든 특성은 InstaSPIN-FOC GUI를 통해 단 몇 분 만에 자동으로 결정될 수 있다. GUI는 브라우저에서 실행할 수 있으며, 기본적으로 TMS320F280049C 및 DRV8232 확장 기판에서 작동하도록 설계된 MotorControl SDK Lab 5를 로드한다. Lab 5는 개발자가 모터를 식별하고 파라미터를 가져올 수 있는 방법을 보여준다. 자세한 내용은 GUI 빠른 시작 안내서 및 실험실 설명서를 참조하라.
먼저 개발자는 TI 개발자 사이트를 통해 InstaSPIN-FOC GUI를 열어야 한다. 그러면 GUI 환경에 개발 IDE와 비슷한 실행 버튼이 있다. 이 버튼을 클릭하여 모터 식별 코드를 LaunchPad로 다운로드하여 실행한다.
개발자가 소프트웨어를 활성화해야 하기 때문에 처음에는 아무런 반응이 없다. 소프트웨어를 활성화하려면 GUI에서 “Enable System”(시스템 활성화) 확인란을 선택한다. 여기서는 “Run”(실행) 확인란을 선택해야 하므로 모터 실행 코드가 실행되지 않다. 실행을 활성화하면 코드가 모터를 식별하도록 설계된 시퀀스를 실행한다. 모터를 작동하는 데 필요한 파라미터를 가져오는 데 필요한 측정을 수행한다. 전체 식별 공정은 몇 분 정도 걸리며, 이 시간 동안 모터가 회전 속도를 높였다가 낮추고 몇 분 동안 느린 속도로 작동된다.
이 공정이 완료되면 개발자의 GUI가 그림 5와 비슷하게 보인다.
-5")
[그림 5] 모터가 식별된 직후의 InstaSPIN-FOC GUI (이미지 출처: Jacob Beningo)
그림 5에서 GUI의 오른쪽 상단에 여러 개의 값이 채워져 있다. 이러한 값은 모터 파라미터이며 나중에 토크 또는 속도 모드에서 모터를 구동하는 데 사용할 수 있도록 기록해 두어야 한다. 또한 왼쪽에 있는 “Motor Identified”(모터 식별됨) 표시기가 회색에서 녹색으로 바뀐다. 이제 GUI를 통해 모터 속도를 직접 제어할 수 있다.
GUI에서 speedRef(Hz) 상자를 변경하여 모터 속도를 간단히 제어할 수 있다. 이 레퍼런스 제어를 통한 모터 가속화는 매우 빠르게 실행된다. 반면에 감속하려면 더 낮은 speedRef에 설정값을 여러 번 입력해야 한다. “Run”(실행) 확인란을 선택 취소하여 모터를 즉시 완전히 멈출 수 있다.
TI의 InstaSPIN-FOC에서 BLDC 모터 사용을 위한 유용한 정보
다음은 BLDC 모터 및 TI의 InstaSPIN-FOC 솔루션으로 작업할 때 개발자가 고려해야 하는 몇 가지 모범 사례이다.
* 내부 플래시에 모터 알고리즘이 내장된 마이크로 컨트롤러를 선택한다. 그러면 모터 알고리즘에 사용되는 코드 공간이 감소하며 실행 성능이 향상될 수도 있다.
* F280049C launchpad에서 사이트 1을 DRV8323RS Launchpad Booster Pack의 기본 사이트로 사용한다. 사이트 2를 사용하려면 소프트웨어를 업데이트해야 할 수 있다.
* TI MotorControl SDK의 일부로 제공되는 13개 실습 예제를 모두 살펴보자. 이러한 실습에서는 모터 파라미터 식별부터 속도 및 토크 제어를 통한 모터 제어까지 모든 항목을 다룬다.
* Lab 5 예제를 사용하여 사용자의 모터 파라미터를 찾다. MOTOR_TYPE_PM을 사용 중인 경우 실험을 성공적으로 컴파일하려면 다음 정의를 추가한 후 조정된 값을 사용해야 한다.
define #define USER_MOTOR_INERTIA_Kgm2 (7.06154e-06)
* InstaSPIN-FOC 온라인 GUI를 사용하여 BLDC 실험을 시작한다.
결론
토크 또는 속도 제어를 위해 BLDC 모터를 구동하는 것은 내장형 소프트웨어 엔지니어의 지식 수준을 능가하는 복잡한 문제일 수 있으므로 프로젝트 개발이 지연될 수 있다. 그림과 같이 Texas Instruments InstaSPIN, MotorControl SDK 및 연결된 하드웨어로 작업하는 개발자는 매우 제한적인 제어 엔지니어링 지식으로 BLDC 모터를 빠르고 쉽게 가동하여 실행할 수 있다.




™ 전원 솔루션.jpg)

 |





 |
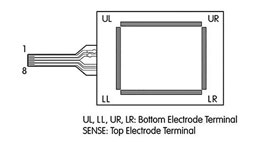
안정적인 터치스크린을 빠르게 구현하는 방법
조회수 138회 / Steven Keeping
Bluetooth 5.3을 Edge IoT 설계에 빠르고 비용 효율적으로 추가하는 방법
조회수 369회 /

적절한 안전 컨트롤러 선택의 복잡성 해결
조회수 95회 / Jeff Shepard
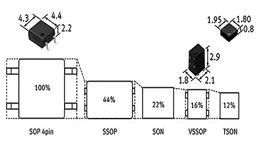
반도체 자동화 테스트 장비에 SSR을 사용하는 방법
조회수 102회 / Jens Wallmann
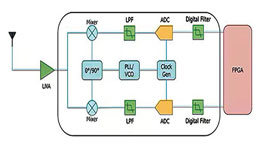
항공 우주 및 방위 산업의 적응형 SDR 통신 시스템에서 민첩한 RF 트랜...
조회수 362회 / Stephen Evanczuk
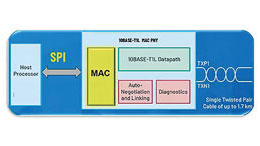
10BASE-T1L을 통한 건물 자동화 혁신
조회수 195회 / Rolf Horn

다기능 전원 공급 장치를 사용하여 지능형 화재 안전 및 보안 시스템 신...
조회수 337회 / Art Pini

전력 소자 구동기의 선택 및 시작하는 방법
조회수 552회 / Bill Schweber
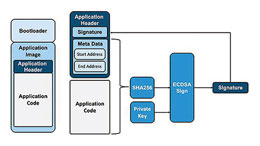
DSC와 MCU를 사용하여 내장형 시스템 보안을 보장하는 방법
조회수 559회 / Stephen Evanczuk
PDF 다운로드
 |
회원 정보 수정