2024 우수잡지


-MPLAB Software Updates-KR 466x58H.jpg)


로봇을 조립하면서 센서, MCU, 소프트웨어 및 모터 제어 익히기

글/Paul Pickering, Digi-Key’s North American Editors
키트에서 다기능 로봇을 조립하면 마이크로 컨트롤러, 센서, 모터, 소프트웨어 개발 등 많은 관련 분야에 대해 배울 수 있으므로 제작자로 처음 시작할 때 많은 도움이 된다. 또한 다양한 로봇 키트, 추가 기능 및 온라인 도움말을 선택할 수 있으므로 초보자와 숙련된 제작자 모두에게 유용하다.
이 기사에서는 DF Robot Devastator 탱크 플랫폼(그림 1)을 기반으로 로봇을 만들 때 고려할 몇 가지 실용적인 단계, 문제 및 가능한 업그레이드에 대해 설명한다.
Devastator를 선택해야 하는 이유? 알루미늄 구조와 두 개의 금속 기어 브러시 DC 모터를 채택하여 견고하고 내구성이 뛰어나다. 최대 3kg의 하중을 처리할 수 있고 센서, 서보, 로봇 암 및 기타 부속품을 위한 여러 실장 구멍이 있으며 널리 사용되는 모든 제작자 친화적인 마이크로 컨트롤러 기판과 호환된다.
완벽한 로봇 시스템 조립
로봇에는 섀시, 휠, 트레드 및 두 개의 모터가 함께 제공되며 설계자에 따라 다른 부품을 선택할 수 있다. 전체 시스템에는 마이크로 컨트롤러 기판, 모터 구동기 기판 및 명령을 입력할 수 있는 수단이 필요하다. 선택적 추가 기능으로는 로봇 암, 동영상 카메라, 자율적인 작동을 위한 충돌 방지 시스템 등이 있다.
마이크로 컨트롤러 플랫폼 선택
Devastator 로봇은 널리 사용되는 다양한 마이크로 컨트롤러 플랫폼과 호환된다. Arduino 오픈 소스 개발 플랫폼은 2003년 이탈리아에서 시작되었으며 초보자와 전문 설계자가 모두 널리 사용하고 있다. Arduino Uno(그림 2)에서는 Microchip Technology(전 Atmel) ATmega328P 8비트 RISC 마이크로 컨트롤러를 사용한다.
기타 표준 기능으로는 사전 프로그래밍된 ATmega16U2 마이크로 컨트롤러에 의해 제어되는 USB 포트, 디지털 입력 및 출력, 아날로그 입력 포트, 소프트웨어 업데이트용 회로 내 직렬 프로그래밍(ICSP) 포트가 있다. 최신 Arduino Due에서는 코어를 32비트 ARMⓇ CortexⓇ-M3로 업그레이드했다. 아래에 설명한 것처럼 이 코어는 Arduino 호환성과 모터 구동기를 결합하는 DFRobot의 컨트롤러 기판에서도 사용된다.
Raspberry Pi 단일 기판 컴퓨터는 원래 학교에서 기본 컴퓨터 공학 교육에 사용하도록 개발되었지만, 제작자 커뮤니티에서도 널리 사용되고 있다. 최신 Raspberry Pi 3은 1.2GHz에서 실행되는 Broadcom 64비트 쿼드 코어 CPU를 기반으로 하며, 802.11n 무선 LAN, Bluetooth 4.1 및 BLE(Bluetooth 저에너지)를 포함한다. 또한 1GB RAM, microSD 카드 슬롯, USB 포트 4개, HDMI 및 이더넷 포트, 카메라 인터페이스, 40개 GPIO 핀 및 기타 특수 인터페이스가 있다.
기존 경험을 활용하려는 Windows 전문가는 정품 인증된 Windows 10 정식 버전이 설치된 Devastator 호환 LattePanda 컨트롤러 기판으로 시작할 수 있다. 이 기판에서는 1.8GHz에서 실행되는 쿼드 코어 CPU를 사용하며, Arduino 호환성을 위해 코프로세서인 Microchip의 8비트 ATmega32u4가 번들로 함께 제공된다.
LattePanda에는 2GB DDR3L RAM, 최대 32GB 스토리지, USB 3.0 포트 1개, USB 2.0 포트 2개, Wi-Fi, Bluetooth 4.0, 코프로세서가 함께 제공되며 두 프로세서 사이에 총 22개의 GPIO가 분할되어 있다.
모터 제어
마이크로 컨트롤러 코어에 장착한 후 다음 단계에서는 모터 제어 기판을 선택한다. Devastator에는 160rpm(무부하)으로 작동하는 6V 모터 2개가 포함되어 있다. 각 모터의 최대 출력 토크는 0.8kgf.cm(0.058ft-lb.)이고 최대 구속 전류는 2.8A이다.
Raspberry Pi에는 로봇 특정 기능을 위한 플러그인 확장 기판이 필요하지만, DFRobot의 DFR0398 Romeo BLE Quad 기판에서는 Arduino 애호가를 위한 마이크로 컨트롤러와 모터 구동기를 모두 포함하는 단일 기판 옵션을 제공한다(그림 3). 이 기판은 UNO 파생 제품보다 더 강력한 코어를 제공하면서도 Arduino 소프트웨어 호환성을 유지한다.
마이크로 컨트롤러는 STMicroelectronics의 M32-F103RET6이다. 이 장치에서는 72MHz에서 실행되는 ARMⓇ CortexⓇ-M3 32비트 코어를 사용하며, 512kB 플래시 메모리, 모터 제어 펄스 폭 변조(PWM) 블록, 16채널 12비트 아날로그 디지털 컨버터(ADC) 및 2채널 12비트 디지털 아날로그 컨버터(DAC)가 포함되어 있다.
모터 구동기는 두 개의 Microsemi HR8833 장치에서 제공한다. 각 MOSFET 구동기에는 Devastator 모터의 양방향 제어를 위한 두 개의 H 브리지 구동기가 포함되어 있다. Romeo BLE Quad에는 4개의 인코더 인터페이스가 포함되어 있으며, Bluetooth 4.0 무선 연결을 위해 Texas Instruments의 CC2540 RF 트랜시버를 통합한다...(중략)




 |





 |
안정적인 터치스크린을 빠르게 구현하는 방법
조회수 100회 / Steven Keeping
Bluetooth 5.3을 Edge IoT 설계에 빠르고 비용 효율적으로 추가하는 방법
조회수 230회 /

적절한 안전 컨트롤러 선택의 복잡성 해결
조회수 83회 / Jeff Shepard
반도체 자동화 테스트 장비에 SSR을 사용하는 방법
조회수 91회 / Jens Wallmann
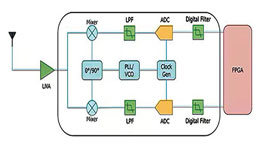
항공 우주 및 방위 산업의 적응형 SDR 통신 시스템에서 민첩한 RF 트랜...
조회수 354회 / Stephen Evanczuk
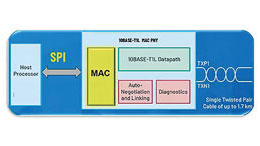
10BASE-T1L을 통한 건물 자동화 혁신
조회수 188회 / Rolf Horn

다기능 전원 공급 장치를 사용하여 지능형 화재 안전 및 보안 시스템 신...
조회수 330회 / Art Pini

전력 소자 구동기의 선택 및 시작하는 방법
조회수 543회 / Bill Schweber
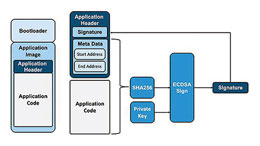
DSC와 MCU를 사용하여 내장형 시스템 보안을 보장하는 방법
조회수 541회 / Stephen Evanczuk
PDF 다운로드
 |
회원 정보 수정