2024 우수잡지


-MPLAB Software Updates-KR 466x58H.jpg)

최신 MEMS 관성 모듈로 응용 제품 개발 문제를 해결하는 방법

글/Jay Esfandyari, STMicroelectronics
MEMS 기반 관성 측정 장치(IMU)는 패키지에 있는 시스템으로 정의된다. 가속도계 기계 감지 소자, 자이로스코프 기계 감지 소자 및 가속도와 각속도를 읽을 수 있는 형식으로 변환하는 전자 회로(‘뇌’)로 구성되어 있다. MEMS IMU는 수십 년의 개발 과정을 거쳤으며, 일부 틈새시장에서 사용되어 왔다. 그러나 이러한 IMU가 폭넓은 응용 분야에서 훨씬 더 많이 구현되려면 먼저 MEMS 기술이 저가의 소형 장치를 제공할 수 있을 정도의 레벨로 발전되어야 한다.
이러한 IMU의 성능은 단순한 동작 감지, 걸음 수 계산, 가로/세로 감지 등 까다롭지 않은 응용 분야에는 충분했지만 휴대가 가능한 웨어러블 사물 인터넷(IoT) 장치에 센서 응용 제품이 탑재되기 시작하면서 더 높은 수준의 성능 향상과 전류 소비 감소를 실현해야 하는 시급한 요구가 발생했다. MEMS IMU의 최신 세대는 이러한 요구를 충족한다.
본 기사에서는 MEMS IMU의 최신 발전을 검토하고 이러한 장치를 통해 하드웨어 및 소프트웨어 엔지니어가 개발 시간을 단축하고 이들이 당면하는 문제를 해결할 방법을 설명한다.
최신 IMU가 새로운 응용 분야의 까다로운 요구 사항을 어떻게 충족할까?
새로운 MEMS 센서 기반 응용 제품은 요구 사항이 매우 까다롭다. 이는 최신 IMU가 가능한 한 크기가 작고, 최대한 적은 전류를 소비하면서, 높은 감도와 뛰어난 정확도, 고해상도 및 매우 낮은 잡음 수준을 갖춰야 한다는 것을 의미한다. 그림 1에서는 2.5 x 3 x 0.8의 작은 패키지에 들어 있는 최신 IMU의 구조를 보여준다.
위에서 언급한 요구 사항 외에도, 최신 IMU는 엔지니어의 설계 및 개발 시간을 단축할 수 있는 내장형 알고리즘을 제공한다. 표 1은 최신 IMU의 주요 파라미터와 기능을 강조하여 보여준다.
표 1에 있는 몇 가지 기능을 검토하여 이러한 기능을 통해 엔지니어가 제품에 IMU가 포함되도록 설계하고 응용 제품을 더 빠르게 개발하는 방법을 설명한다.
장치 인터페이스
설계자가 센서 데이터를 더 유연하게 읽을 수 있도록 하는 두 개의 인터페이스가 있다(SPI 및 I2C). 또한 IMU는 자이로스코프와 가속도계를 모두 사용하는 광학 손떨림 방지(OIS) 및 전자 손떨림 방지(EIS) 응용 제품을 지원한다. 따라서 OIS 데이터를 출력하는 전용 보조 SPI 인터페이스도 있다.
손떨림 방지: EIS 및 OIS
MEMS IMU의 주요 발전 중 하나는 매우 까다로운 OIS 및 EIS 응용 제품에 사용될 수 있는 성능이다. 그림 2a 및 2b에는 OIS 연결의 작동 방식을 표시하는 구성도가 있다.
그림 2a에서 장치는 전용 SPI 인터페이스를 통해 OIS 데이터를 출력할 수 있다. 장치는 OIS 응용 제품 전용으로 구성 가능한 신호 처리 경로를 제공한다. 사용자 인터페이스(UI) 신호 처리 경로는 OIS 세그먼트와 완전히 독립되어 있으며 장치에 내장된 FIFO 기능을 통해 읽을 수 있다. 그림 2b는 IMU에서 사용할 수 있는 두 번째 옵션을 보여준다. OIS 응용 제품의 센서 데이터는 시스템 보드의 응용 프로세서(AP)로 직접 전송될 수 있다. 내장형 FIFO에 데이터를 저장한 다음 FIFO에서 AP로 데이터 세트 전체를 읽을 수도 있다.
IMU는 잡음이 낮아 까다로운 응용 분야에서 정확도를 높이다.
잡음 수준이 매우 낮은 센서 데이터를 필요로 하는 응용 분야는 많다. 그중에서도 다음의 두 응용 분야는 가장 인기가 높으면서 매우 낮은 잡음 수준과 고도의 바이어스 안정성을 갖춘 IMU를 필요로 한다.
1. AR(증강 현실): 최근 AR은 최신 MEMS IMU의 발전으로 인해 휴대용 장치에서 큰 관심을 받았다. AR은 중첩된 그래픽, 오디오 및 기타 감각 향상 기능의 상호작용으로 실제 환경에 구현되는 기능으로, 이 환경이 실시간으로 표시되기 때문에 상호작용과 조작이 가능하다.
2. 실내 포지셔닝: MEMS IMU는 GPS 데이터에 대한 액세스가 축소되어 있거나 정확하고 안정적인 포지셔닝을 수행할 수 없는 위치에서 실내 포지셔닝을 구현할 때 중요한 역할을 수행한다. 실내 포지셔닝의 중요한 부분을 차지하는 PDR(Pedestrian Dead Reckoning)은 주로 센서를 이용하여 정확한 데이터를 제공함으로써 새로운 위치와 방향을 계산한다. PDR 솔루션의 정확도를 확보하기 위해서는 IMU의 성능과 정확도가 필수적이다.
최신 IMU는 잡음이 매우 낮은 자이로스코프와 가속도계를 제공하여 문제를 해결한다. 표 1에서는 가속도계와 자이로스코프 모두의 낮은 잡음 수준을 보여준다...(중략)






 |





 |
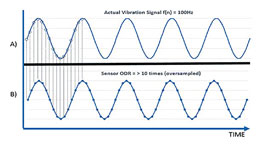
디지털 MEMS 센서의 앨리어싱을 방지하는 방법
조회수 285회 / Tom Bocchino
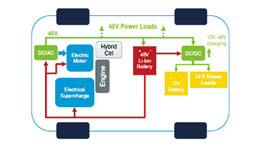
48V 마일드 하이브리드 시스템으로 향상된 전원 변환 달성
조회수 1906회 / Filippo Scrimizzi 외 2인
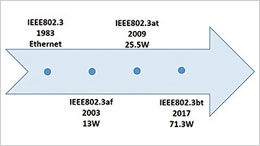
PoE 지원 스마트 LED 조명 시스템
조회수 3991회 / Akshat JAIN 외 2인

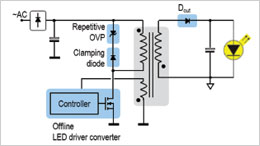
고 역률, 낮은 THD, 낮은 대기 전력의 정전류 LED 드라이버
조회수 3140회 / Aman Jha 외 1인
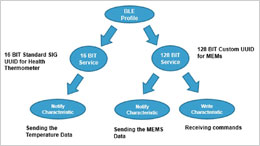
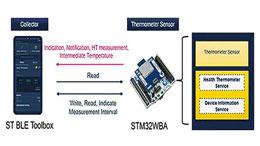
원격측정 비콘 기능 결합한 BLE 기반 IR 체온계
조회수 3273회 / Salil JAIN 외 1인

ST의 다이나믹 NFC/RFID 태그 IC 제품군
조회수 2575회 / Amit Sethi
LED 조명을 위한 ST의 다양한 제품 - 아키텍처, 제품, 평가 툴
조회수 2314회 / Luigi Galioto

최신 MEMS 관성 모듈로 응용 제품 개발 문제를 해결하는 방법
조회수 2707회 / Jay Esfandyari
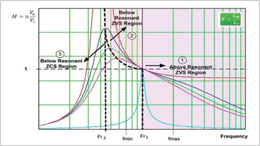
하프 브리지 공진 LLC 컨버터와 일차측 MOSFET 선택
조회수 6578회 / Alfio Scuto 외 1인
PDF 다운로드
 |
회원 정보 수정