2024 우수잡지


-MPLAB Software Updates-KR 466x58H.jpg)
단일 권선/단상 BLDC 모터의 구동을 위한 저비용 MCU 활용 방법

글/마이크 고메즈(Mike Gomez) 애플리케이션 엔지니어(Application Engineer),
마크 팔론스(Mark Pallones) 팀장(Team Lead)
마이크로칩 테크놀로지(Microchip Technology)
저전력 모터는 구조가 단순하여 제작하기가 더 쉽기 때문에 가격이 저렴하며, 모터 권선을 제어하고 전력을 공급하기 위해 단일 위치 센서와 몇 개의 드라이버 스위치만을 필요로 한다. 따라서 모터와 전자 제어 장치 사이의 상충관계를 순조롭게 해결할 수 있다. 비용적인 측면에서의 효율성을 유지하려면 저렴한 모터 드라이버가 필요하다. 이 글에서 설명하는 드라이버 회로는 2개의 피드백 루프를 사용할 수 있다. 이중에서 내곽 루프는 정류 컨트롤을 담당하고, 외곽 루프는 속도 컨트롤을 처리한다. 모터 속도는 외부 아날로그 전압을 참조하며, 과전류 및 과열 조건에 대해서 결함 검출(fault detection)을 실시한다.
그림 1은 마이크로칩의 PIC16F1613 8비트 마이크로컨트롤러를 사용한 단상 드라이버를 나타낸다. 이 마이크로컨트롤러가 선택된 이유는 핀 수가 적고, 드라이버 스위치 제어와 모터 속도 측정, 회전자 위치 예측, 결함 검출 구현 등의 기능을 갖는 주변장치들을 내장하고 있기 때문이다. 이 애플리케이션은 상보형 파형 생성기(CWG), 신호 측정 타이머(SMT), 아날로그-디지털 컨버터(ADC), 디지털-아날로그 컨버터(DAC), 캡처 컴페어 PWM(CCP), 고정 전압 레퍼런스(FVR), 타이머, 비교기, 온도 표시기 등의 주변장치를 사용한다. 이들 주변 장치는 펌웨어에 의해 내부적으로 연결되므로, 필요한 핀 수가 절감된다.
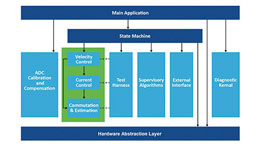
모터 권선에 전력을 공급하는 풀 브리지 회로는 CWG 출력으로 컨트롤한다. 홀(Hall) 센서는 회전자 위치를 정하는 데 사용된다. 과전류 보호를 위해, 모터 권선에 흐르는 전류는 검출 저항 Rshunt를 통해 전압으로 변환된다. 그 속도는 외부 아날로그 입력을 참조할 수 있다. 그림 2는 이 모터 드라이버의 컨트롤 다이어그램을 보여준다. 이 애플리케이션의 경우, 정격 모터 전압은 5V이고 정격 속도는 2400 rev/min이다. 모터 드라이버 전원 전압은 9V이다. 속도 레퍼런스는 어떠한 아날로그 입력이든 될 수 있다. 이 마이크로컨트롤러의 ADC 모듈은 10비트 분해능이고 최대 8개 채널을 제공하므로 다양한 유형의 아날로그 입력을 사용할 수 있다. 그러므로 이를 사용해서 속도 레퍼런스와 초기 PWM 듀티 사이클을 도출하고 속도 레퍼런스 소스에 기반하여 모터 속도를 초기화할 수 있다.
비례 적분(PI) 컨트롤러의 결과값에 따라 초기 듀티 사이클을 높이거나 낮출 수 있고 이 새로운 듀티 사이클 값은 CCP로 로드되며, 풀 브리지 드라이버의 로우 사이드 스위치 변조 컨트롤(즉 모터 속도의 컨트롤)을 위해 PWM 출력을 CWG의 초기 소스로 사용한다.
내곽 루프
내곽 피드백 루프는 정류 컨트롤을 담당한다. CWG 출력은 스테이터 권선의 여자(excitation)를 컨트롤하는 것으로 홀 센서 출력의 상태에 따라 결정되며, 비교기는 이 를 FVR과 비교한다. 센서 출력 내의 노이즈를 무시하기 위해 비교기 히스테리시스 현상(hysteresis)이 활성화된다.
비교기 출력은 시계방향 또는 시계반대방향 회전을 발생시키기 위해 순방향 및 역방향 풀 브리지 모드 사이에서 전환(toggle)된다. CWG 출력은 풀 브리지 회로의 스위치 입력으로 전달된다. 하나의 전기 사이클을 발생시키기 위해서는 하나의 순방향/역방향 조합을 실행해야 한다. 모터가 기계적으로 한 번의 회전을 하기 위해서는 2개의 전기 사이클이 필요하다. 따라서 모터가 시계방향으로 완전히 한 바퀴 회전하기 위해서는 2개의 순방향/역방향 조합을 실행해야 한다.
풀 브리지 회로
그림 3의 풀 브리지 회로는 2개의 p-채널 MOSFET (하이-사이드 스위치)과 2개의 n-채널 MOSFET(로우-사이드 스위치로)으로 이루어졌다. p-채널 트랜지스터의 가장 큰 장점은 하이-사이드 스위치 위치에서 게이트 구동 기법이 단순하다는 것이며, 따라서 하이-사이드 게이트 구동 회로의 비용을 낮출 수 있다. 하이-사이드 및 로우-사이드 스위치를 동시적으로 스위칭(교차 전도)하는 일은 가능하지만, 이러한 스위칭은 전류 슛스루(shoot-through)를 발생시켜 드라이버의 소자 장치들을 손상시킬 수 있기 때문에 피해야 한다. 이를 방지하기 위해 CWG의 카운터 레지스터를 사용해서 데드 밴드 지연시간을 구현할 수 있다. 이는 하이-사이드와 로우-사이드의 전도를 동시적으로 정지시키는 중첩되지 않는(non-overlapping) 출력 신호를 제공한다. 이상적인 최적의 스위칭 성능을 달성하기 위해서는 n-채널 및 p-채널 MOSFET의 온 저항(RDSon)과 총 게이트 전하(QG)가 같아야 한다. 그러므로 이들 파라미터를 일치시키기 위해서는 상보적인 MOSFET 쌍을 선택하는 것이 좋지만, 현실적으로는 서로 다른 구조 때문에 불가능하다. 따라서 RDSon 성능을 일치시키기 위해서는 p-채널 디바이스의 칩 크기가 n-채널 디바이스의 2~3배가 되어야 한다. 하지만 칩 크기가 커질수록 QG의 영향이 커진다. 그렇기 때문에 MOSFET을 선택할 때는 스위칭 성능에 가장 큰 영향을 미치는 것이 RDSon일지 QG일지를 판단하고 그에 따라 선택해야 한다...(중략)




™ 전원 솔루션.jpg)

 |





 |

저전압 실링 팬 레퍼런스 설계
조회수 99회 / 마이크로칩

액세서리 에코시스템 및 일회용 애플리케이션을 위한 비용 효율적인 보...
조회수 180회 / Xavier Bignalet
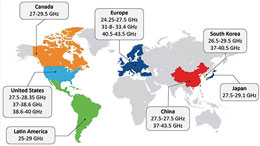
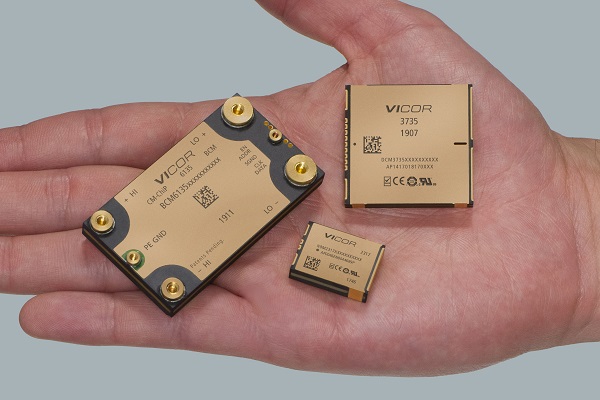
GaN-on-SiC 모놀리식 마이크로파 집적회로 전력증폭기
조회수 437회 / Mike Ziehl 외 1인
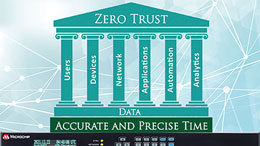
제로 트러스트 네트워크의 신뢰 시간, 왜 중요한가?
조회수 332회 / Paul Skoog

파워 디바이스의 터닝 포인트, 실리콘 카바이드 반도체의 이점
조회수 771회 / Xuning Zhang 외 2인
보안 요소를 통한 펌웨어 검증 활용 사례
조회수 703회 / Xavier Bignalet

IoT 보안 구축을 지원하는 사전 프로비저닝된 하드웨어 기반 보안 요소
조회수 930회 / Xavier Bignalet

하드웨어 기반 보안 구축, 사물인터넷 보안의 시작
조회수 1319회 / 마이크로칩테크놀로지
고급 모터 제어 기법 구현_에너지 효율적인 모터 제어를 위한 센서리스 FOC
조회수 4026회 / Nelson Alexander
PDF 다운로드
 |
회원 정보 수정
